Ouster Sensor SDK
The Ouster Sensor SDK provides developers interfaces for interacting with sensor hardware and recorded sensor data suitable for prototyping, evaluation, and other non-safety-critical applications in Python and C++. Example and reference code is provided for common operations on sensor data in both languages. The SDK includes APIs for:
Querying and setting sensor configuration
Recording and reading data in pcap format
Reading and buffering sensor UDP data streams reliably
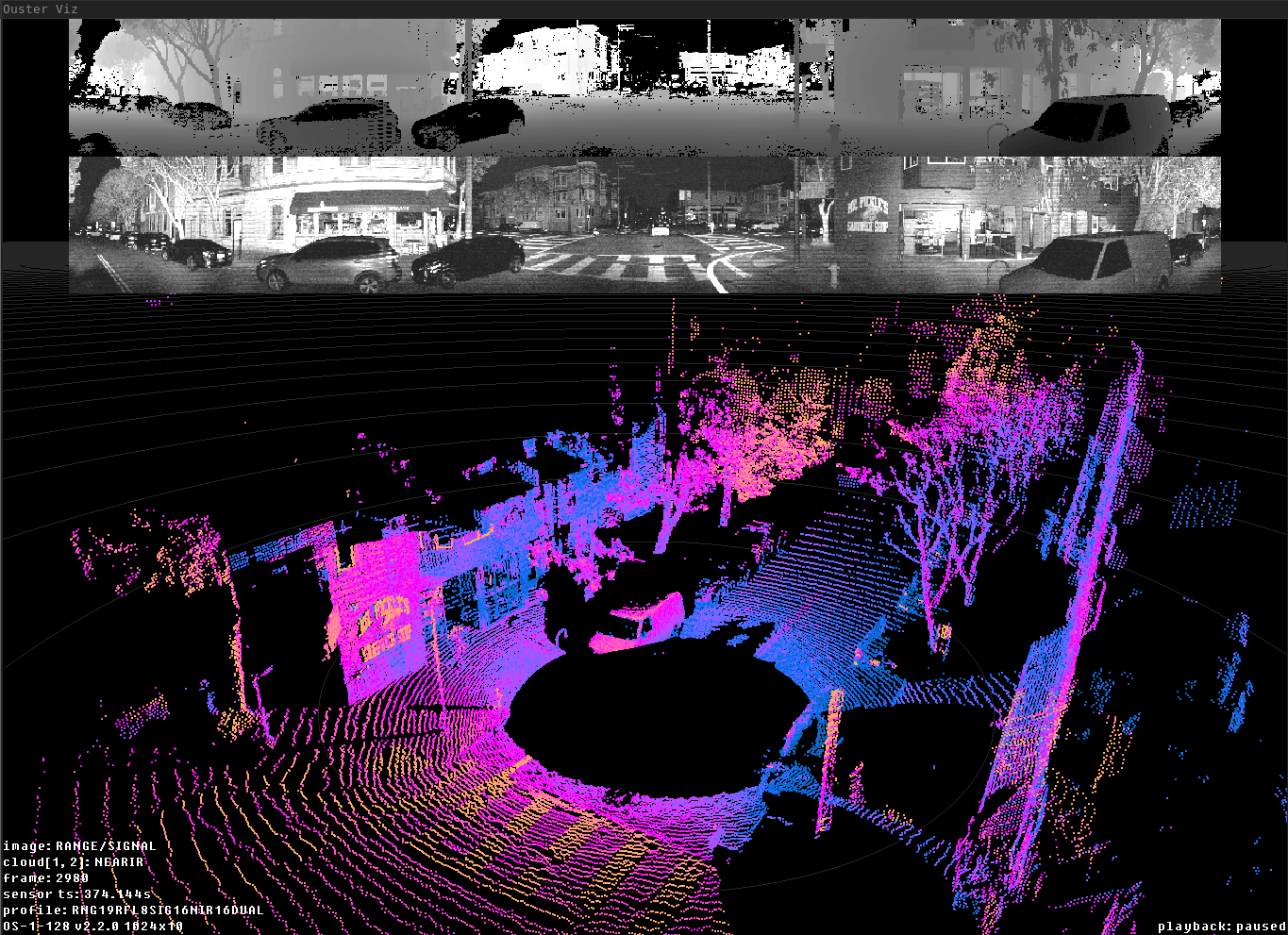
Conversion of raw data to range/signal/near_ir/reflectivity images (destaggering)
Efficient projection of range measurements to Cartesian (x, y, z) corrdinates
Visualization of multi-beam flash lidar data
Additionally, in Python, the SDK also provides:
Frame-based access to lidar data as numpy datatypes
A responsive visualizer utility for pcap and sensor
Quick links
Status and Contact Info
The Ouster SDK is currently provided as an early pre-1.0 preview. The APIs are subject to change in every release.
For questions about using your Ouster hardware, you may find it useful to reference the Ouster sensor documentation and/or contact Ouster support. For issues specific to the SDK please use the GitHub issue tracker.