Introduction to Ouster Digital Lidar
OUSTER is building digital lidar sensors for autonomy in the Industrial, Smart Infrastructure, Robotics, and Automotive markets. Join us to learn more about what we’re building.
Technical Documentation
The Ouster sensor documentation is meant to allow the users to take advantage of all the features that are available with Ouster Sensors.
- Quick links:
- Supporting Guides, such as
Thermal Integration Guide and many more
Hardware User Manual
Note
Firmware 3.x and later has a minimum hardware requirement (Rev7 and later for OS0, OS1 & OSDome). Hardware User Manual for other revisions (Rev C, D, 05 & 06) can be found on Ouster Downloads.
Sample Data
Note
All Ouster sample data is provided under the CC BY-NC-SA license, whether obtained through the above links or from the Ouster website.
Visualize recorded data:
Note
Users can also download the data using the Ouster Data App. Please use the link provided above and navigate to the Download tab on the right top corner of your screen.
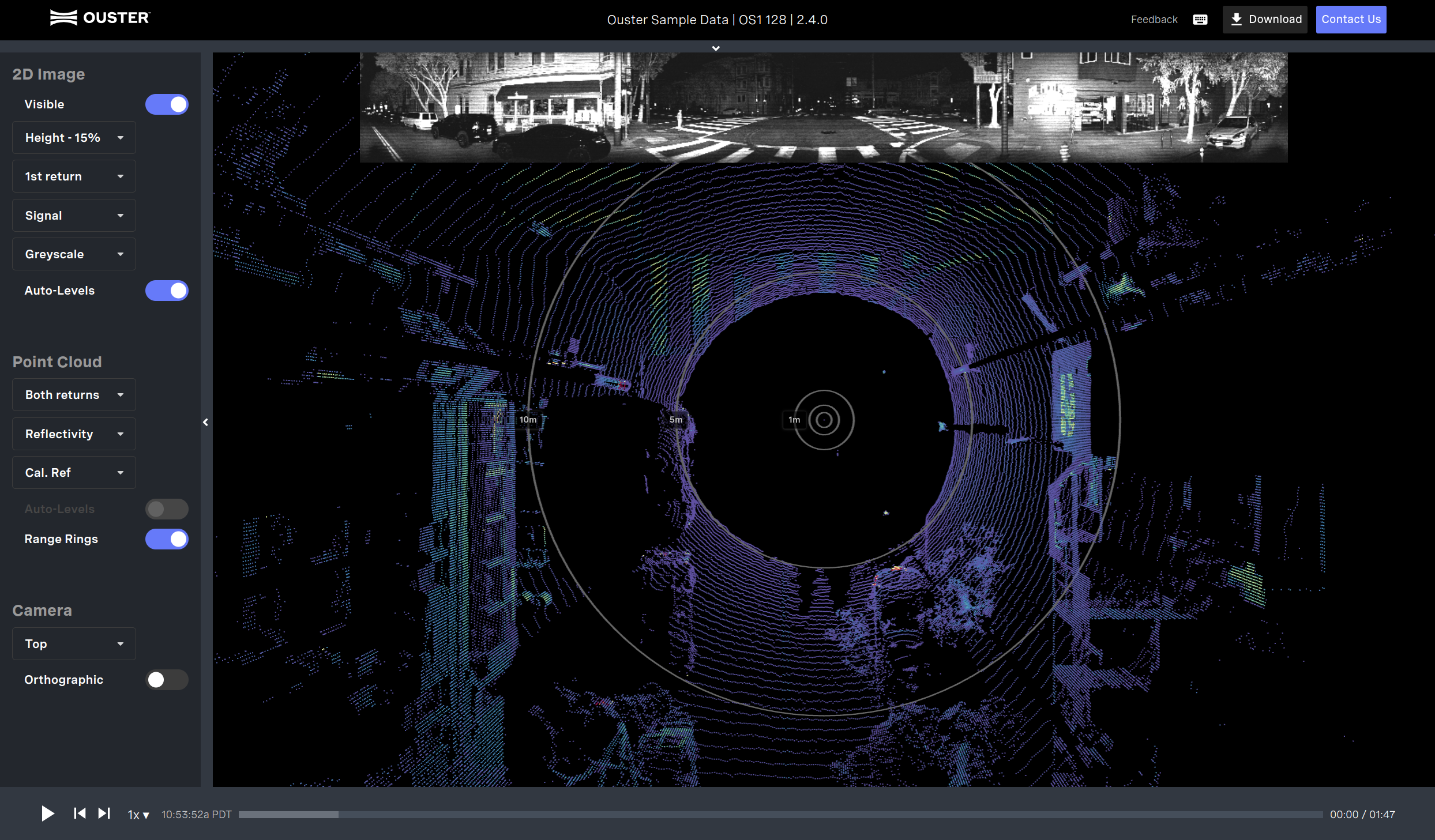
User Interface- Data App
Note
Ouster presents sample data collected in the latest released firmware in this document, if you need sample data for a particular version of firmware please contact Ouster’s Team.
Visualizing and Interacting with an Ouster Sensor
Once the sensor is connected, the user can visualize the point cloud using Ouster Python SDK or using Ouster Studio . Both Ouster Python SDK and Ouster Studio are available for Linux, Mac, and Windows.
Please visit Ouster Resources for the latest tools to visualize your sensor’s output.
- Ouster Python SDK
Ouster Python SDK provides a high-level interface for interacting with sensor hardware and record sensor data suitable for prototyping, evaluation, and other non-safety critical applications. Example and reference code is provided for several common operations on sensor data. he SDK includes APIs for:
Querying and setting sensor configuration
Recording and reading data in pcap format
Reading and buffering sensor UDP data streams reliably
Frame-based access to lidar data as numpy datatypes
Conversion of raw data to range/signal/near_ir/reflectivity images (de-staggering)
Efficient projection of range measurements to Cartesian (X, Y, Z) coordinates
- Ouster Studio
Ouster Studio is an application provided by Ouster to visualize, record, and analyze data from Ouster lidar sensors. Ouster Studio is cross-platform, with official support for Windows, MacOS and Ubuntu. The software performs real-time visualization, processing, and recording of live 3D lidar data captured from Ouster lidar sensors.