Ouster Sensor SDK
The Ouster Sensor SDK provides developers interfaces for interacting with sensor hardware and recorded sensor data suitable for prototyping, evaluation, and other non-safety-critical applications in Python and C++. Example and reference code is provided for common operations on sensor data in both languages. The SDK includes APIs for:
Querying and setting sensor configuration
Recording and reading data in pcap format
Recording and reading data in Open Sensor Format (OSF)
Reading and buffering sensor UDP data streams reliably
Conversion of raw data to range/signal/near_ir/reflectivity images (destaggering)
Efficient projection of range measurements to Cartesian (x, y, z) coordinates
Visualization of multi-beam flash lidar data
Zone monitor capabilities
Additionally, in Python, the SDK also provides:
Frame-based access to lidar data as numpy datatypes
A responsive visualizer utility for pcap and sensor
Quick links
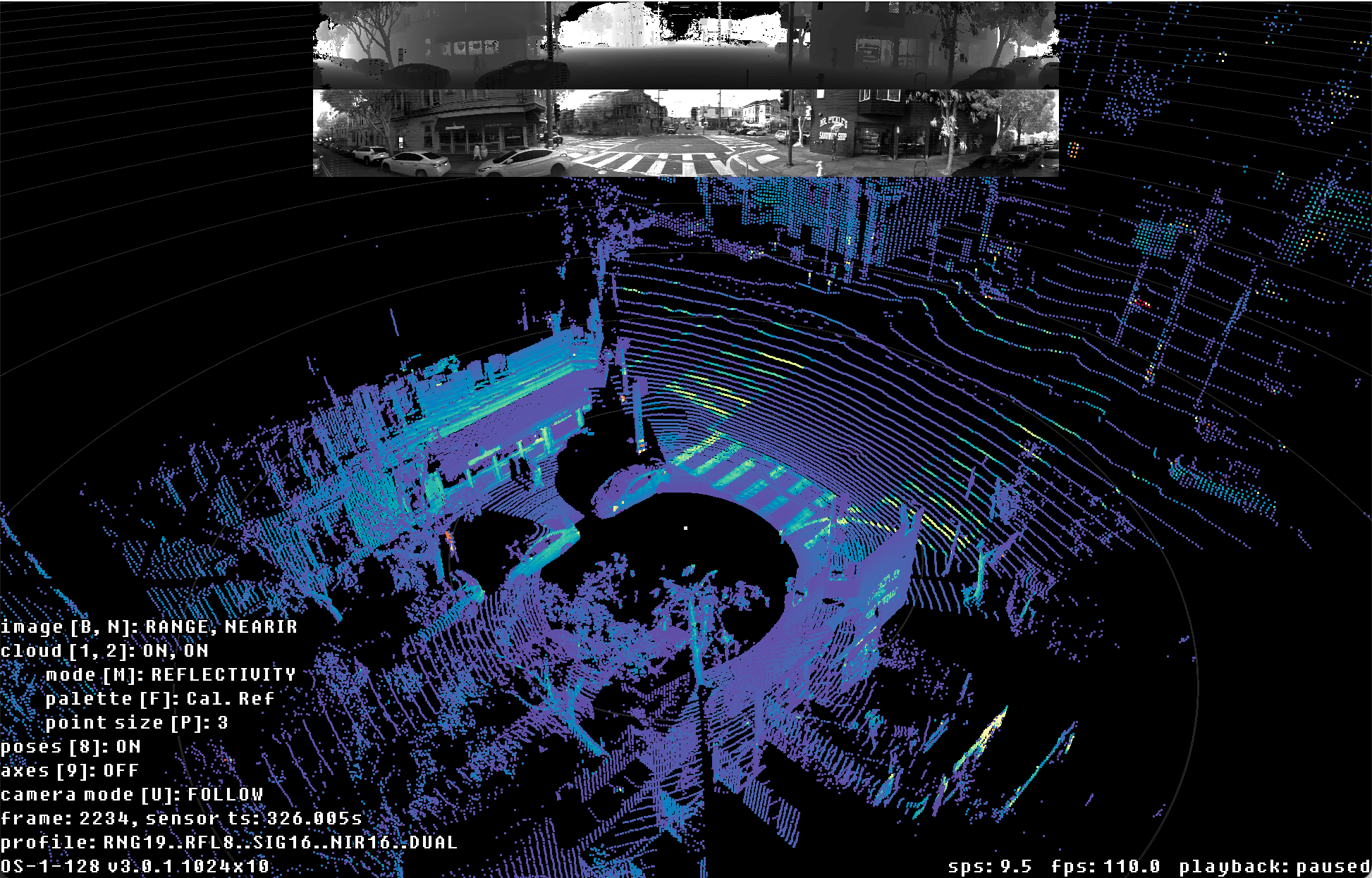
Ouster SDK CLI visualization of OS1 128 Rev 7 sample data
Supported Devices
The SDK supports the following Ouster sensors:
You can obtain detailed specs sheets for the sensors and obtain updated firmware through the website downloads section.
Compatibility with Firmware (FW)
The Ouster SDK currently provides backwards compatibility with any FW 2.4 and later for all releases. Older SDK versions are not, however, generally forward-compatible with later FW releases, e.g., the SDK version 20210608 (ouster-sdk 0.2.0) is not compatible with FW 3.0.
Note
Please note that compatibility does not indicate that upgrading between SDK versions can happen seamlessly. For information on breaking changes between releases, please the Changelog.
The following table indicates the compatibility of each released SDK version and its FW compatibility:
SDK Tag (Release) / Python SDK |
FW 2.0 |
FW 2.1 |
FW 2.2 |
FW 2.3 |
FW 2.4 |
FW 2.5 |
FW 3.0 |
FW 3.1 |
FW 3.2 |
|---|---|---|---|---|---|---|---|---|---|
C++ SDK 2025XXXX / Python SDK 0.16.0 |
no |
no |
no |
no |
yes |
yes |
yes |
yes |
yes |
C++ SDK 20250408 / Python SDK 0.15.0 |
no |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
no |
C++ SDK 20250117 / Python SDK 0.14.0 |
no |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
no |
C++ SDK 20240703 / Python SDK 0.13.1 |
no |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
no |
C++ SDK 20240703 / Python SDK 0.13.0 |
no |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
no |
C++ SDK 20240703 / Python SDK 0.12.0 |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
no |
C++ SDK 20240423 / Python SDK 0.11.1 |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
no |
C++ SDK 20240423 / Python SDK 0.11.0 |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
no |
C++ SDK 20231031 / Python SDK 0.10.0 |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
no |
C++ SDK 20230710 / Python SDK 0.9.0 |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
no |
C++ SDK 20230403 / Python SDK 0.8.1 |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
no |
C++ SDK 20230114 / Python SDK 0.7.1 |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
yes |
no |
C++ SDK 20220927 / Python SDK 0.5.2 |
yes |
yes |
yes |
yes |
yes |
no |
no |
no |
no |
C++ SDK 20220826 / Python SDK 0.5.1 |
yes |
yes |
yes |
yes |
yes |
no |
no |
no |
no |
C++ SDK 20220608 / Python SDK 0.4.1 |
yes |
yes |
yes |
yes |
no |
no |
no |
no |
no |
C++ SDK 20220504 / Python SDK 0.4.0 |
yes |
yes |
yes |
yes |
no |
no |
no |
no |
no |
C++ SDK 20220107 / Python SDK 0.3.0 |
yes |
yes |
yes |
no |
no |
no |
no |
no |
no |
C++ SDK 20210608 / Python SDK 0.2.1 |
yes |
yes |
no |
no |
no |
no |
no |
no |
no |
C++ SDK 20201209 / n/a |
yes |
yes |
no |
no |
no |
no |
no |
no |
no |
C++ SDK v1.13.0 / n/a |
no |
no |
no |
no |
no |
no |
no |
no |
no |
If you are a C++ SDK user who has upgraded to the latest FW but requires an older SDK version, please contact our customer support or the Field Applications Engineer who works with you.
See the following section regarding when we will drop support for various FWs.
Supported Platforms and Deprecations
Upcoming deprecations/dropped support can be found at our GH announcement of Lifecycle Policies
Status and Contact Info
The Ouster SDK is currently provided as an early pre-1.0 preview. The APIs are subject to change in every release.
For questions about using your Ouster hardware, you may find it useful to reference the Ouster sensor documentation and/or contact Ouster support. For issues specific to the SDK please use the GitHub issue tracker. Announcements for the Ouster SDK are posted in the Ouster Github announcements