Start mapping with the Ouster-CLI
Installation
The Ouster CLI mapping functionality is a part of the Ouster SDK Python package.
To install the Ouster SDK with the mapping capabilities:
$ python3 install ouster-sdk
PS > py -3 install ouster-sdk
Mapping Tools
After installing the Ouster SDK and mapping dependencies, you can explore various mapping tools using a connected Ouster sensor or a PCAP/OSF file.
Use ouster-cli to view the available commands and options you can use --help. Try the
following command:
ouster-cli source <SENSOR_HOSTNAME> / <FILENAME> --help
Currently, there are two main commands: slam and save. You can further explore each
command by accessing their respective submenus using the --help flag. For example:
ouster-cli source <SENSOR_HOSTNAME> / <FILENAME> slam --help
SLAM Command
Simultaneous localization and mapping (SLAM) is a technique that enables a system to construct a map of its surroundings while simultaneously determining its own position on that map. The Ouster SDK slam command writes lidar scans with per-column poses into an OSF file, an open-source custom file format for which Ouster provides conversion capabilities, allowing for the reconstruction of a detailed and precise map later.
Connect to a sensor or use a PCAP/OSF file Download Sample PCAP File
Note
Connecting to an Ouster sensor is covered in the Networking Guide section of the Ouster Sensor Documentation.
Then execute the following command:
ouster-cli source <SENSOR_HOSTNAME> / <FILENAME> slam viz -o sample.osf
Note
Please replace <HOSTNAME> with the corresponding hostname or IP of your sensor, and replace <FILENAME> with the actual file path and name of the PCAP/OSF file. Similarly, make the necessary substitutions in the subsequent commands.
The terminal will display details such as the output filename and the processing duration. The
output filename must have the .osf extension in order to be used by the save command.
You can adjust settings such as point size, color, switch between 2D images, and pause playback in the visualizer, among other options. More details can be found at the Ouster Visualizer
Accumulated Scan in SLAM command visulizer
Within the Ouster Visualizer, there is a visualization feature known as ScansAccumulator. This functionality represents a continuation of efforts to visualize lidar data by incorporating SLAM-generated poses stored within the LidarScan.pose property.”
Available view modes
There are three view modes of ScansAccumulator, that may be enabled/disabled depending on it’s params and the data that is passed throught it:
poses (or TRACK), key
8- all scan poses in a trajectory/path view (available only if poses data is present in scans)scan map (or MAP), key
7- overall map view with select ratio of random points from every scan (available for scans with/without poses)scan accum (or ACCUM), key
6- accumulated N scans (key frames) that is picked according to params (available for scans with/without poses)
Key bindings
Keyboard controls available with ScansAccumulator:
Key
What it does
6Toggle scans accumulation view mode (ACCUM)
7Toggle overall map view mode (MAP)
8Toggle poses/trajectory view mode (TRACK)
k / KCycle point cloud coloring mode of accumulated clouds or map
g / GCycle point cloud color palette of accumulated clouds or map
j / JIncrease/decrease point size of accumulated clouds or map
Ouster CLI ScansAccumulator options:
--accum-num N- accumulate N scans (default:0)
--accum-every K- accumulate every Kth scan (default:1)
--accum-every-m M- accumulate a scan every Mth meters traveled (default:None)
--accum-map- enable the overall map accumulation, select some percentage of points from every scan (default: disabled)
--accum-map-ratio R- set R as a ratio of points to randomly select from every scan (default:0.001(0.1%))
Dense accumulated clouds view (with every point of a scan)
To obtain the densest view use the --accum-num N --accum-every 1 params where N is the
number of clouds to accumulate (N up to 100 is generally small enough to avoid slowing down the viz interface):
ouster-cli source <SENSOR_HOSTNAME> / <FILENAME> slam viz --accum-num 20 -o sample.osf
and the dense accumulated clouds result:
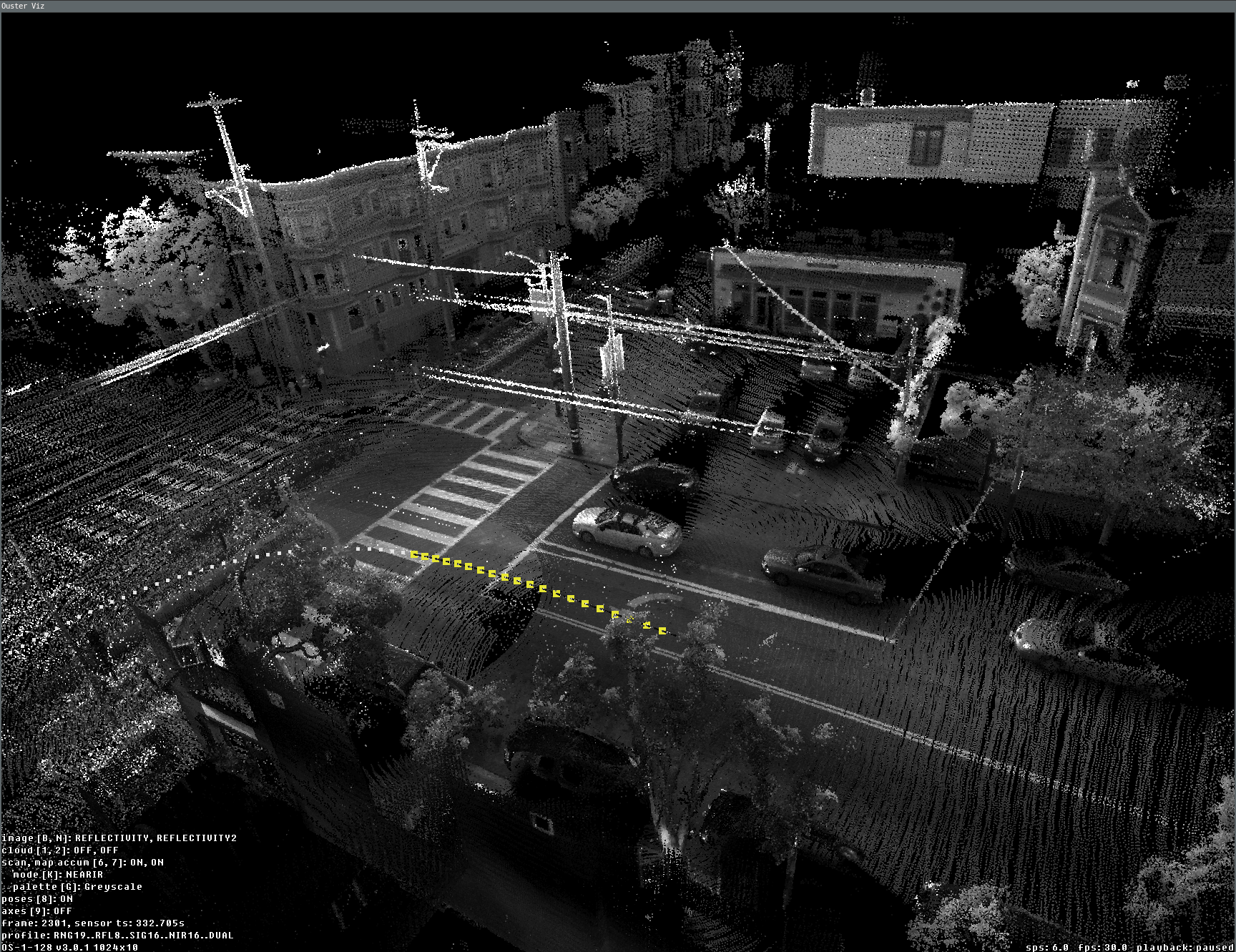
Dense view of 20 accumulated scans during the slam viz run
Overall map view (with poses)
One of the main tasks we frequently need is a preview of the overall map. We can test this by using the generated OSF file, which was created with the above command and contains the SLAM-generated LidarScan.pose property.
ouster-cli source sample.osf viz --accum-num 20 \
--accum-every 0 --accum-every-m 10.5 --accum-map -r 0 -e stop
Here is a preview example of the overall map generated from the accumulated scan results. By utilizing the ‘-e stop’ option, the visualizer stops once the replay process finishes, displaying the preview of the lidar trajectory:
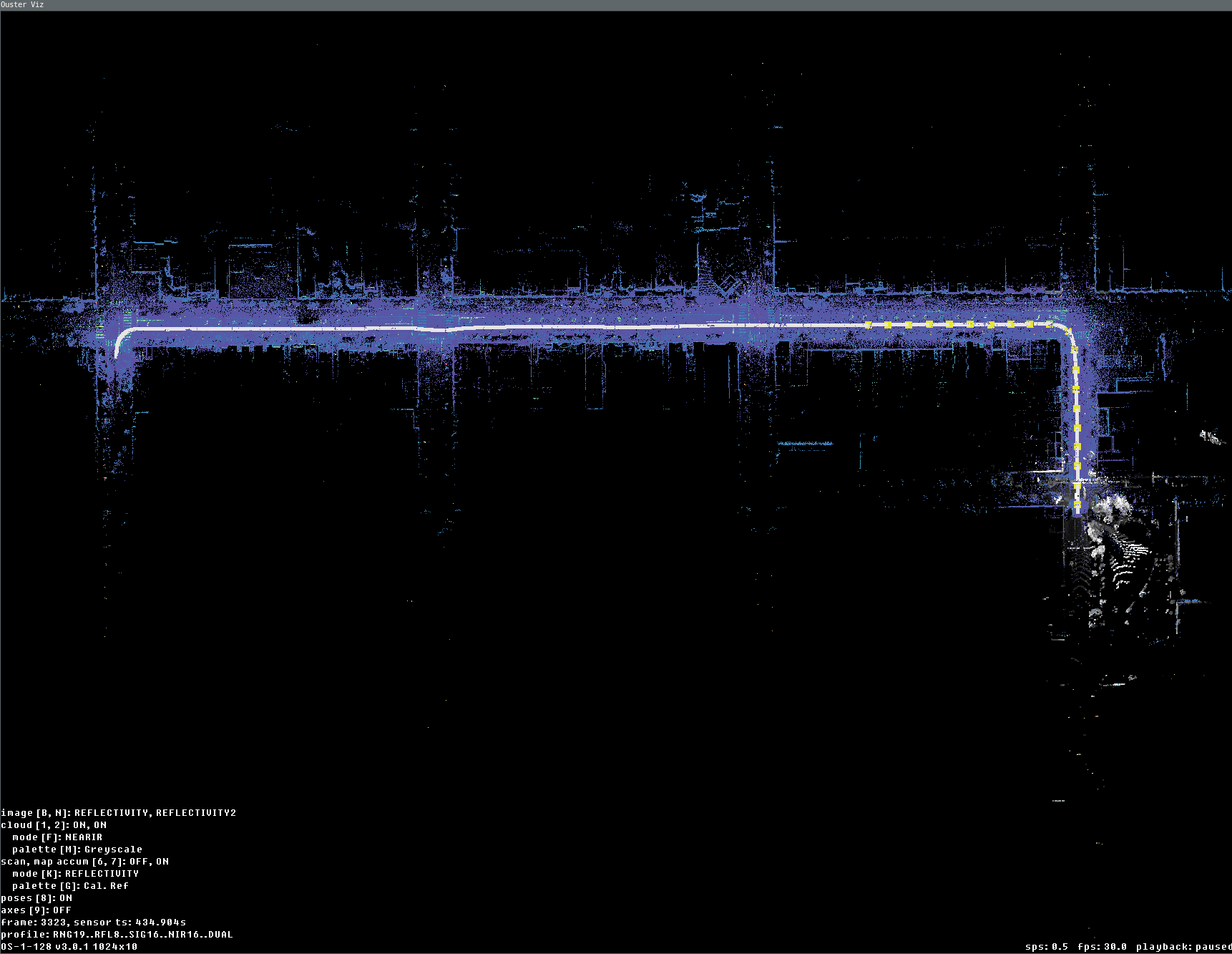
Data fully replayed with map and accum enabled (last current scan is displayed here in grey palette)
Save Command
The save command can be used to convert the SLAM-generated OSF file to a point cloud data file
format such as LAS (.las), PLY (.ply), or PCD (.pcd). The output file format depends on the
extension of the output filename. Let’s use the OSF file generated from the SLAM command
and convert it to a PLY file:
ouster-cli source sample.osf save output.ply
The save command automatically splits and downsamples the trajectory-adjusted point cloud into
several files to prevent exporting a huge size file. The terminal will display details, and you
will see the following printout for each output file:
Output file: output1.ply
3932160 points accumulated during this period,
154228 near points are removed [3.92 %],
1475955 down sampling points are removed [37.54 %],
2213506 zero range points are removed [56.29 %],
88471 points are saved [2.25 %].
You can adjust the minimal range, select different fields as values, and change the voxel size by
referring to the --help flag for more information.
You can use an open source software CloudCompare to import and view the generated point cloud data files.