Lidar Scan API
In this reference document, we explain a core concept in both C++ and Python, and will often link
function names in the order (C++ class/function, Python class/function). For
language-specific usage and running example code, please see the Python LidarScan examples
or the C++ LidarScan examples.
The LidarScan class (ouster::LidarScan, LidarScan) batches lidar
packets by full rotations into accessible fields of the appropriate type. The LidarScan also
allows for easy projection of the batched data into Cartesian coordinates, producing point clouds.
Creating the LidarScan
A LidarScan (ouster::LidarScan, LidarScan) contains fields of data
specified at its initialization either through a lidar profile or a specific list of fields:
scan = LidarScan(h, w, info.format.udp_profile_lidar)
auto profile_scan = ouster::LidarScan(w, h, info.format.udp_profile_lidar);
Since each LidarScan corresponds to a single frame (and is batched accordingly), you can access
the frame_id with simply:
frame_id = scan.frame_id # frame_id is an int
int32_t frame_id = scan.frame_id
In addition to frame_id and the fields specified at initialization, a LidarScan also
contains the column header information: timestamp, status, measurement_id. These are
aggregated from each measurement block into W-element arrays, which are represented as an
Eigen::Array and a numpy.ndarray in C++ and Python respectively. Note that if you use set
the sensor configuration parameter azimuth_window to something less than the full width, the
values in the header outside the azimuth window will be 0’d out accordingly.
# each of these has as many entries as there are columns in the scan
ts_0 = scan.timestamp[0]
measurement_id_0 = scan.measurement_id[0]
status_0 = status[0]
auto ts = profile_scan.timestamp();
auto status = profile_scan.status();
auto measurement_id = profile_scan.measurement_id();
For any field contained by a LidarScan scan, you can access that field in the following way:
ranges = scan.field(client.ChanField.RANGE)
ranges2 = scan.field(client.ChanField.RANGE2)
reflectivity = scan.field(client.ChanField.REFLECTIVITY)
reflectivity2 = scan.field(client.ChanField.REFLECTIVITY2)
auto range = profile_scan.field<uint32_t>(ChanField::RANGE);
Finally, the fields of an existing LidarScan can be found by accessing the fields of the
scan through an iterator:
scan = next(scans)
print("Available fields and corresponding dtype in LidarScan")
for field in scan.fields:
print('{0:15} {1}'.format(str(field), scan.field(field).dtype))
for (const auto& kv : scan.fields()) {
auto field_name = kv.first;
// auto& field = kv.second;
std::cerr << "\t" << field_name << "\n ";
}
Note
The units of a particular field from a LidarScan are consistent even
when you use lidar profiles which scale the returned data from the sensor.
This is because the LidarScan will reverse the scaling for you when
parsing. For example, the RANGE field on a LidarScan constructed with the
low data rate profile will be in millimeters even though the return from
the sensor is given in 8mm increments.
Running the above code on a sample LidarScan will give you output that looks like:
Available fields and corresponding dtype in LidarScan
RANGE uint32
RANGE2 uint32
SIGNAL uint16
SIGNAL2 uint16
REFLECTIVITY uint8
REFLECTIVITY2 uint8
NEAR_IR uint16
Now that we know how to create the LidarScan and access its contents, let’s see what
we can do with it!
Projecting into Cartesian Coordinates
To facilitate working with 3D points, you can create a pre-computed XYZ look-up table XYZLut
(ouster::XYZLut, client.XYZLut()) on the appropriate metadata, which you can
then use to project the RANGE and RANGE2 fields into Cartesian coordinates efficiently. The
result of calling this function will be a point cloud represented as an array (either an
Eigen::Array or a numpy array). See the respective API documentations for
ouster::cartesian() and client.XYZLut() for more details.
# transform data to 3d points
xyzlut = client.XYZLut(metadata)
xyz = xyzlut(scan.field(client.ChanField.RANGE))
XYZLut lut = make_xyz_lut(info);
auto range = scan.field(sensor::ChanField::RANGE);
auto cloud = cartesian(range, lut);
Once you have your x, y, and z values, you can plot them easily to get something like:
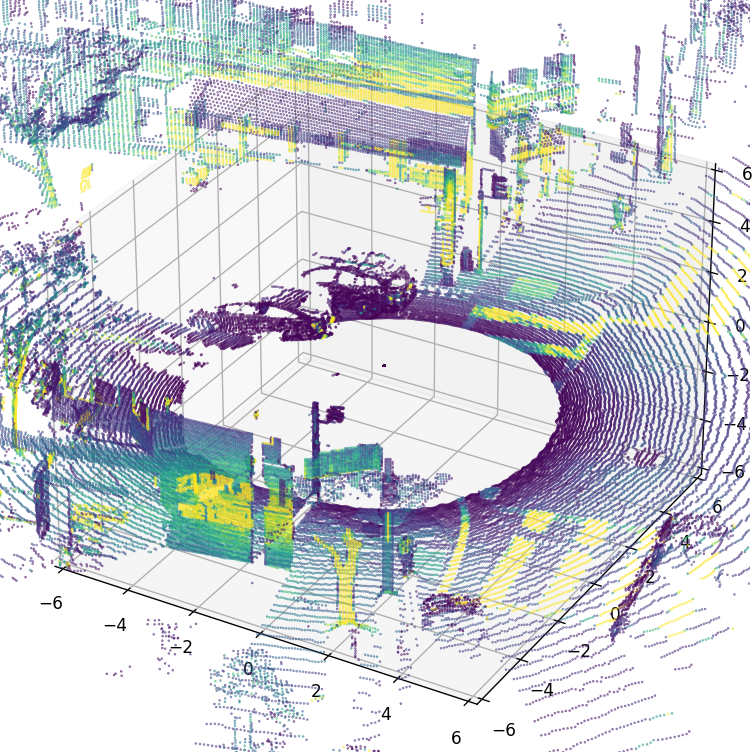
Point cloud from OS1 sample data (scan 84). Points colored by SIGNAL value.
To see how to generate this image, see the Python LidarScan examples.
Staggering and Destaggering
The default representation of LidarScan stores data in staggered columns, meaning
that each column contains measurements taken at a single timestamp. As the lasers flashing at each
timestamp are arranged over several different azimuths, the resulting 2D image if directly
visualized is not a natural image.
Let’s take a look at a typical staggered representation:
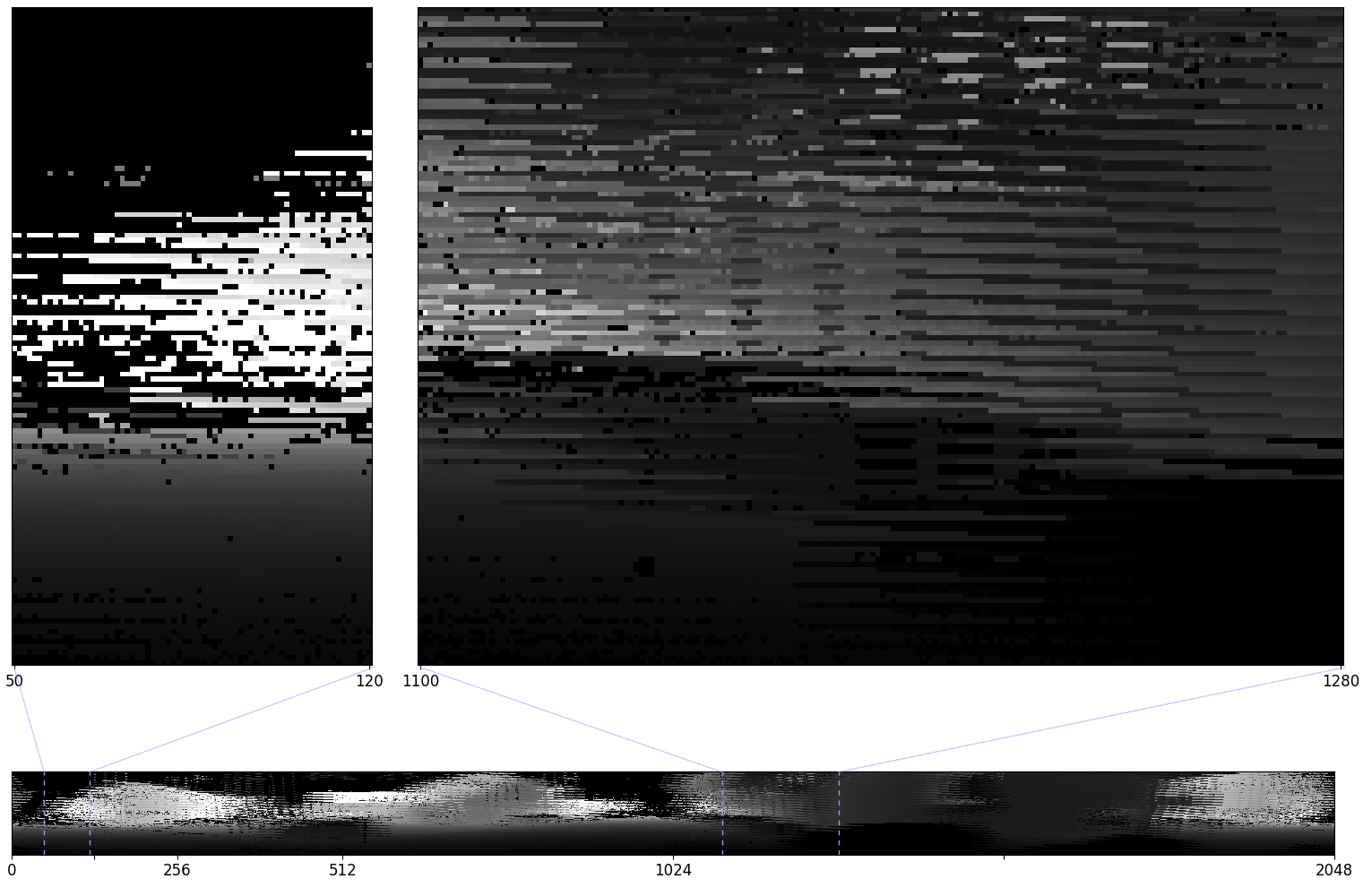
LidarScan RANGE field visualized with matplotlib.pyplot.imshow() and simple gray
color mapping for better look.
It would be convenient to obtain a representation where the columns represent azimuth angle instead
of timestamp. For this natural 2D image, we destagger the relevant field of the LidarScan with
destagger (ouster::destagger(), client.destagger() function):
ranges = scan.field(client.ChanField.REFLECTIVITY)
ranges_destaggered = client.destagger(source.metadata, range)
auto reflectivity_destaggered =
destagger<uint32_t>(reflectivity, info.format.pixel_shift_by_row);
The above code gives the scene below (see the long strip at the bottom). We’ve magnified two patches for better visibility atop.
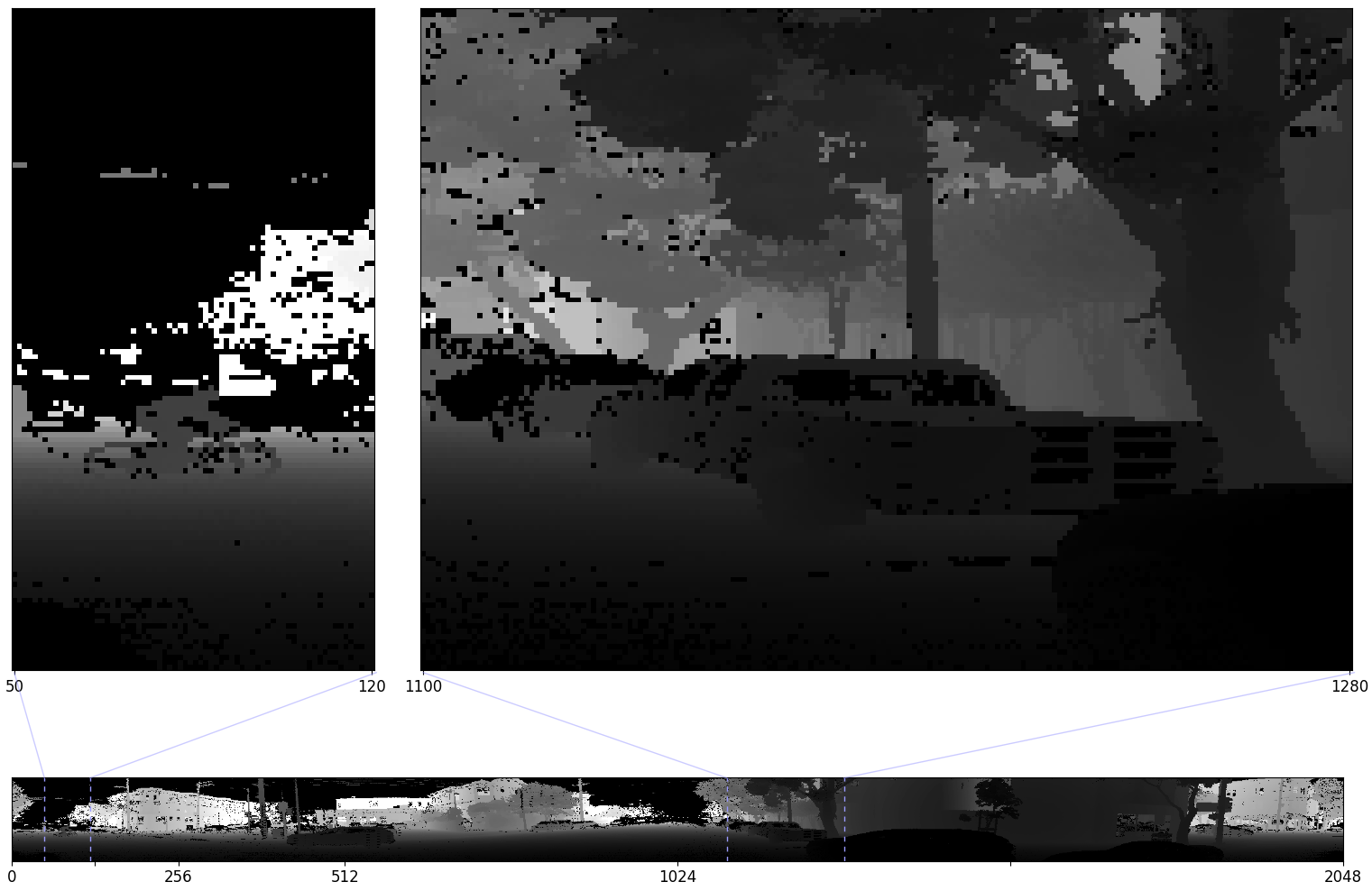
destaggered LidarScan RANGE field
After destaggering, we can see the scene contains a man on a bicycle, a few cars, and many trees. This image now makes visual sense, and we can easily use this data in common visual task pipelines.
Populating LidarScans
This reference has covered how to a LidarScan, and how to access, project, and destagger its
contents. But in order for LidarScan s to be useful, we need a way to populate them with packet
data! For convenience, the Ouster Python SDK provides the Scans interface, which allows
both sampling, used in Visualization with Matplotlib, and streaming, used in
Streaming Live Data.
Under the hood, this class batches packets into LidarScans. C++ users must batch packets
themselves using the ouster::ScanBatcher class. To get a feel for how to use it, we recommend
reading this example on GitHub.