Lidar Hub
The Ouster Lidar Hub is the customer’s interface to the Ouster Perception software stack. It is deployed as a separate Docker container in conjunction with the Ouster Perception solution and provides various configuration and integration features, including:
On-device Aggregation of occupations and object lists
The gathering and reporting of Diagnostics and Alerts to the Ouster Gemini Portal
Down-sampling, Batching and Filtering of Perception JSON Streams used by:
MQTT Publisher(s)
TCP Relay Server(s)
On-device Data Recording of JSON Streams and Point Cloud data
Zone Occupancy Event Recorder
Architecture
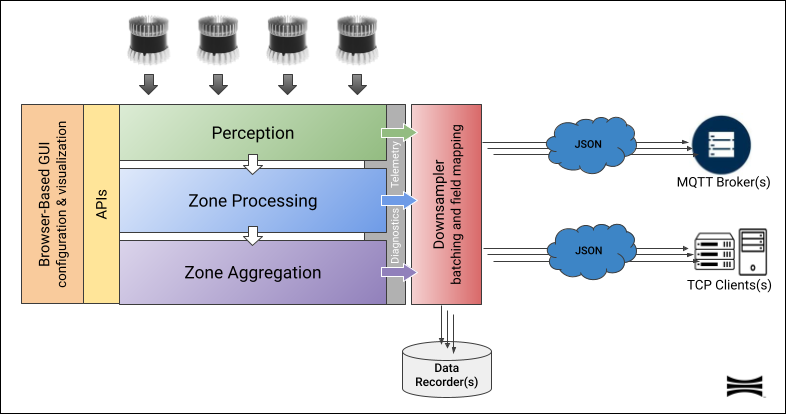
Lidar Hub Architecture
Application Configuration
The Ouster Lidar Hub is configured via the Gemini Detect Viewer Settings. When started for the first time, the Lidar Hub will load its default settings.
The “application” section of the Lidar Hub settings is used for defining top-level application-specific settings.
Example
"application": {
"id": "*ABCD1234EFGH5678",
"label": "Site A",
"logging": {
},
"gemini_portal": {
},
"world": {
}
}
Primary application Fields
Field |
Format |
Description |
|---|---|---|
|
|
Unique ID of this installation (typically the unique hardware identifier generated by the Ouster Agent or the hardware MAC Address) |
|
|
System Logging configuration |
|
|
Ouster Gemini Portal configuration |
|
|
World configuration |
Optional Application Fields
Field |
Format |
Description |
|---|---|---|
|
|
Network interface name to be used for defining the |
|
|
User-defined label displayed in the Gemini Portal and used as an MQTT Publisher configuration variable |
|
|
System port number to use for ensuring a single instance of the application (default = 4999) |
|
|
Internal queues bind port range…10 ports in total must be defined (default = [4001, 4002, 4003, 4004, 4005, 4006, 4007, 4008, 4009, 4010, 4011]) |
|
|
Internal queue send high-water-mark (default = 100) |
|
|
Internal queue receive high-water-mark (default = 100) |
|
|
Web server listening port number (default = 8003) |
|
|
Used for application diagnostics (default = false) |
System Logging
The Lidar Hub supports System logging to both the console and to file. When running in a Docker container, console logging is captured by Docker. When installed on an Ouster Catalyst device, console logging is forwarded to the common Ouster logs accessible at https://<<host>>/logs.
Configuration
The application and application.logging sections of the Lidar Hub settings are used for configuring application logging. By default, file logging is disabled, and the console logging level is set to INFO.
Example
"application": {
...
"logging": {
"console_log_level": 20
}
}
Primary logging Fields
Field |
Format |
Description |
|---|---|---|
|
|
Logging configuration`` |
|
|
Application logging level (CRITICAL = 50, ERROR = 40, WARNING = 30, INFO = 20, DEBUG = 10, VERBOSE = 1, DISABLED = 0) |
Optional logging Fields
Field |
Format |
Description |
|---|---|---|
|
|
Application health logging level (default 10 - DEBUG) |
|
|
Application health logging interval (default 3600) |
|
|
Optional application file logging level (CRITICAL = 50, ERROR = 40, WARNING = 30, INFO = 20, DEBUG = 10) |
|
|
Optional application file logging path (default = /opt/ouster/logs/) |
Ouster Gemini Portal
Ouster’s cloud-based device management, monitoring and analytics platform is where the end user can gain visibility into the health and performance of their Lidar deployment(s). The Gemini Portal is offered as a Ouster Mananged / Ouster Hosted cloud service and as a Ouster Managed / Customer Hosted product.
Configuration
The application.gemini_portal section of the Lidar Hub settings is used for configuring the integration with the Ouster Gemini Portal. By default, System Diagnostics are configured to be published to the Gemini Portal every 60 seconds. When the Aggregation Module is enabled, real-time and timeseries data will also be published to the Gemini Portal as configured.
Example
"application": {
...
"gemini_portal": {
"host": "gemini.ouster.com",
"customer_id": "73bbb8a6-ffd7-4898-a8dd-8003441ec724",
"state": "provisioned",
"diagnostics_publishing_enabled": true,
"aggregation_publishing_enabled": true,
"rpc": {
}
}
}
Primary gemini_portal Fields
Field |
Format |
Description |
|---|---|---|
|
|
Gemini Portal configuration |
|
|
Host name/IP of the Gemini Portal (leave blank to disable) |
|
|
Your Gemini Portal Customer ID (provided by Ouster) |
|
|
Provisioning state with the Gemini Portal ( |
|
|
Indicator if the publishing of diagnostics to the Gemini Portal is enabled (default = true) |
|
|
Indicator if the publishing of aggregation to the Gemini Portal is enabled (default = true) |
|
|
Gemini Portal RPC configuration |
Optional gemini_portal Fields
Field |
Format |
Description |
|---|---|---|
|
|
Gemini Portal MQTT(S) port number (default = 8883 w/TLS or 1883 w/out TLS) |
|
|
Flag indicating if the MQTT connection to the Gemini Portal should use TLS (default = true) |
|
|
Gemini Portal MQTT QOS (0 = At most once, 1 = At least once, 2 = Exactly once) (default = 1) |
|
|
Seconds to wait for a connection to be established to the Gemini Portal (default = 5.0) |
|
|
Delay in seconds before retrying a failed connection to the Gemini Portal (default = 60.0) |
|
|
Gemini Portal RPC configuration |
|
|
Flag indicating if Gemini Portal Requests are enabled (e.g. “GET”) (default = true) |
|
|
Flag indicating if Gemini Portal Commands are enabled (e.g. “PUT”, “POST”, “DELETE”) (default = true) |
|
|
Flag indicating if Gemini Portal Generation of Output is enabled (default = true) |
|
|
Flag indicating if Gemini Portal OTA is enabled (default = true). |
|
|
Interval as which to check for Gemini Portal Software OTA requests (default = 3600.0 seconds). |
|
|
Interval as which to check for Gemini Portal Firmware OTA requests (default = 3600.0 seconds). |
|
|
Cloud Streaming configuration |
|
|
Gemini Detect Cloud Viewer Down-sampling Hz (a value of 0 disables down-sampling) |
|
|
Gemini Portal 2D Viewer Down-sampling Hz (a value of 0 disables down-sampling) |
|
|
Provisioning state with the Edge Gemini Portal (default = |
|
|
Host name/IP of the Edge Gemini Portal (default = |
|
|
Gemini Portal MQTT(S) port number (default = 8883 w/TLS or 1883 w/out TLS) |
|
|
Flag indicating if the MQTT connection to the Edge Gemini Portal should use TLS (default = true) |
World
The Lidar Hub has the ability to optionally convert JSON Data Stream x/y cartesian coordinates to WGS84 longitude/latitude coordinates given a scene’s world reference geo-coordinate and azimuth. By default, this option is disabled.
Configuration
The world section of the Lidar Hub settings is used for configuring the scene’s world reference geo-coordinate and azimuth.
Example
"application": {
...
"world": {
"latitude": 37.76466741329934,
"longitude": -122.4136976526134,
"azimuth": 57.6
}
}
Primary World Fields
Field |
Format |
Description |
|---|---|---|
|
|
Lidar Hub world configuration |
|
|
Scene’s world reference latitude |
|
|
Scene’s world reference longitude |
|
|
Scene’s world reference azimuth |
Optional World Fields
Field |
Format |
Description |
|---|---|---|
|
|
Reserved for internal use by the Gemini Detect Viewer for storing map underlay settings |
Perception Software Stack
By default, the Lidar Hub will connect to the Perception software stack running in the same Docker Network on the local host, and once initialized, will begin generating system diagnostics at a cadence of once every 60 seconds.
Configuration
The Perception section of the Lidar Hub settings is used for configuring Perception Software Stack connectivity, Lidar Hub system diagnostics and the Lidar Hub aggregation module.
Example
"perception": {
"perception_websocket": {
"host": "perception",
"port": 3001
},
"event_zone_websocket": {
"host": "event-zones",
"port": 3004
},
"align_websocket": {
"host": "perception",
"port": 3005
},
"object_list": {
"host": "perception",
"port": 3002,
"suppress_unoccupied_frames": false
},
"occupations": {
"host": "event-zones",
"port": 3003,
"suppress_unoccupied_frames": false
},
"diagnostics": {
"interval_secs": 60.0
},
"aggregation": {
"realtime_hertz": 1.0,
"timeseries_secs": 60.0
}
}
Primary perception Fields
Field |
Format |
Description |
|---|---|---|
|
|
Perception Server web socket configuration |
|
|
Host name of the Perception Server (typically the Docker service name) |
|
|
Port number of the Perception Server web socket server |
|
|
Event Zone Server web socket configuration |
|
|
Host name of the Event Zone Server (typically the Docker service name) |
|
|
Port number of the Event Zone Server web socket server |
|
|
Host name of the Perception Server (typically the Docker service name) |
|
|
Port number of the Alignment web socket server |
|
|
Perception Server object_list configuration |
|
|
Host name of the JSON object_list TCP server (typically the Docker service name) |
|
|
Port number of the JSON object_list TCP server |
|
|
Event Zone Server occupations configuration |
|
|
Host name of the JSON occupations TCP server (typically the Docker service name) |
|
|
Port number of the JSON occupations TCP server |
|
|
System Diagnostics configuration |
|
|
Aggregation Module configuration |
Optional perception Fields
Field |
Format |
Description |
|---|---|---|
|
|
URL of the Perception Server RESTful API endpoint (default = https://perception:8000/perception/api/v1/) |
|
|
URL of the Event Zone Server RESTful API endpoint (default = https://event-zones:8001/event/api/v1/) |
|
|
URL of the Ouster Agent RESTful API endpoint (default = http://host.docker.internal:4443/agent/api/v1/) |
|
|
URL of the Ouster ML Server RESTful API endpoint (default = http://ml-detection:5000/ml-detectio/api/v1/) |
|
|
URL of the Ouster Event Server RESTful API endpoint (default = http://event-server:8004/event-server/api/v1/) |
|
|
URL of the BlueCity RESTful API endpoint (default = http://its-edge:8005/its-edge/api/v1/) |
|
|
URL of the Analytics Server RESTful API endpoint (default = http://ouster-analytics-server:8006/analytics/api/v1/) |
|
|
Maximum time to wait for Agent connectivity (default = 30 seconds) |
|
|
Flag indicating if the Perception Server web socket server requires TLS (default = true) |
|
|
Delay in seconds before retrying a failed connection to the Perception Server web socket server (default = 60.0) |
|
|
Seconds to wait before resetting a connection due to no data being received from the Perception Server web socket server (default = 60.0) |
|
|
Flag indicating if the Event Zone Server web socket server requires TLS (default = true) |
|
|
Delay in seconds before retrying a failed connection to the Event Zone Server web socket server (default = 60.0) |
|
|
Seconds to wait before resetting a connection due to no data being received from the Event Zone Server web socket server (default = 60.0) |
|
|
Flag indicating if the JSON object_list TCP server requires TLS (default = false) |
|
|
Delay in seconds before retrying a failed connection to the JSON object_list TCP server (default = 60.0) |
|
|
Seconds to wait before resetting a connection due to no data being received from the JSON object_list TCP server (default = 60.0) |
|
|
Flag indicating if unoccupied frames shoud be supressed from processing and all published streams (default = false) |
|
|
Flag indicating if the JSON occupations TCP server server requires TLS (default = false) |
|
|
Delay in seconds before retrying a failed connection to the JSON occupations TCP server (default = 60.0) |
|
|
Seconds to wait before resetting a connection due to no data being received from the JSON occupations TCP server (default = 60.0) |
|
|
Flag indicating if unoccupied frames should be suppressed from processing and all published streams (default = false) |
System Diagnostics
The Lidar Hub includes a Systems Diagnostics module that collects and aggregates statistics, health, alerts, and telemetry from the compute device, all active Lidar sensors and all software related to the Perception Solution, including the Lidar Hub itself. The Diagnostics data is broken into three buckets:
Attributes: Static data that is only reported when changed.
Telemetry: Dynamic data that is reported every diagnostics_interval_secs
Alerts: Lidar and software alerts reported with every detection and update
Configuration
The perception.diagnostics section of the Lidar Hub settings is used for configuring the generation of diagnostics. By default, diagnostics are enabled at an interval of once every 60-seconds.
Example
"perception": {
...
"diagnostics": {
"interval_secs": 60.0
}
}
Primary diagnostics Fields
Field |
Format |
Description |
|---|---|---|
|
|
Diagnostics configuration |
|
|
Diagnostics interval in seconds. A diagnostics record is emitted every interval (DISABLED = 0) |
Optional diagnostics Fields
None
Diagnostics Attributes
Compute device, lidar sensor and software Attributes will be published to the Gemini Portal when any value changes. The current attribute and telemetry diagnostics values can also be requested at any time via the Lidar Hub’s /diagnostics REST API resource.
Example Batching of one or more Frame(s) in a single Message
{
"diagnostics": [
{...},
{...},
{...}
]
}
Example Frame
{
"hardware_id": "*1234567890",
"customer_id": "73bbb8a6-ffd7-4898-a8dd-8003441ec724",
"label": "Site A",
"latitude": 37.76466741329934,
"longitude": -122.4136976526134,
"azimuth": 57.6,
"compute": {
"host_name": "CATALYST-PRO-01",
"mac_address": "FF:FF:FF:FF:FF:FF",
"architecture": "x86_64",
"is_arm": false,
"has_gpu": false,
"os_version": "",
"last_upgrade": "",
"last_upgrade_timestamp": 0,
"total_cpu_cores": 16,
"total_memory": 33354051584,
"total_disk_space": 982141468672,
"boot_timestamp": 1702226939,
"health": "ONLINE"
},
"lidars": [
{
"model": "OS1",
"serial_number": "992144000616",
"hostname": "os-992144000616.local.",
"ip_address": 255.255.255.255,
"node_id": "",
"beam_configuration": "128",
"firmware": {
"version": "v2.3.1",
"image": "ousteros-image-prod-aries-v2.5.3+20240111055903"
},
"position": {
"x": -122.4136976526134,
"y": 37.76466741329934,
"z": 3.42
},
"connection_status": "connected",
"status": "RUNNING",
"is_ml": false,
"host_health": "ONLINE",
"health": "ONLINE"
}
],
"nodes": [
{
"hostname": "NODE-A,
"id": "ABCD1234EFGH5678",
"license": "none",
"position": {
"x": 12.37,
"y": -8.97,
"z": 0.01
},
"perception_client": "connected",
"port": 1234,
"raw_frame_client": "connected",
"rest_client": "connected",
"host_health": "ONLINE",
"health": "ONLINE"
}
],
"solutions_agent": {
"software_version": "2.2.0",
"package_version": "2.2.0-1,
"is_running": true,
"is_software_repository_available": true,
"software_repository_version": "",
"running_containers": []
},
"perception_server": {
"software_version": "2.2.0",
"settings_version": 5,
"is_ml": false,
"is_aggreagtor": false,
"is_running": true,
"is_paused": false,
"license": "none",
"num_inclusion_zones": 0,
"num_exclusion_zones": 0,
"configuration": {
},
"extrinsics": {
}
},
"event_zone_server": {
"software_version": "2.2.0",
"settings_version": "1.0.0",
"is_running": true,
"license": "none",
"num_event_zones": 0,
"configuration": {
},
"event_zones": {
}
},
"lidar_hub": {
"software_version": "2.2.0",
"settings_version": "2.2.0.1",
"license": "none",
"is_running": true,
"diagnostics_enabled": true,
"aggregation_enabled": false,
"mqtt_publishers": 0,
"tcp_relay_servers": 2,
"websocket_servers": 1,
"datarecorders": [
],
"configuration": {
},
"is_scout": false
},
"health": "ONLINE",
"is_scout": false,
"diagnostics_version": 2.2.0
}
JSON Field Definitions
Field |
Format |
Description |
|---|---|---|
|
|
identifying ID of Edge Device (MAC Address or Agent Locking Code) |
|
|
Your Gemini Portal Customer ID (provided by Ouster) |
|
|
User-defined label displayed in the Gemini Portal and used as an MQTT Publisher configuration variable |
|
|
Lidar Hub world latitude |
|
|
Lidar Hub world longitude |
|
|
Lidar Hub world azimuth |
|
|
Compute Device details |
|
|
Host name of the compute device |
|
|
MAC Address of the compute device |
|
|
Compute device CPU architecture (x86_64, aarch64) |
|
|
Indicator if the compute device CPU architecture is identified as ARM |
|
|
Indicator if at least one compute device GPU has been detected |
|
|
Operating system of the compute device |
|
|
Description of last OS upgrade performed on the compute device |
|
|
Timestamp of last OS upgrade performed on the compute device (microseconds since Jan. 1, 1970) |
|
|
Number of CPU cores on the compute device |
|
|
Total memory installed in compute device (bytes) |
|
|
Total storage installed in compute device (bytes) |
|
|
System boot time (seconds since Jan. 1, 1970) |
|
|
Determined health of the compute device (ONLINE / WARNING / OFFLINE) |
|
|
Array of active Lidar sensors |
|
|
Lidar sensor model |
|
|
Lidar sensor serial number |
|
|
Lidar sensor host name |
|
|
Lidar sensor IP Address |
|
|
Lidar sensor beam configuration as reported by the firmware |
|
|
Lidar Firmware details |
|
|
Lidar sensor firmware version as reported by the firmware |
|
|
Lidar sensor firmware image as reported by the firmware |
|
|
Lidar sensor position (geo-coordinates if Lidar Hub world is set, otherwise cartesian coordinates in the world reference frame) |
|
|
x cartesian coordinates or longitude |
|
|
x cartesian coordinates or latitude |
|
|
height in meters |
|
|
Lidar sensor connection status |
|
|
Lidar sensor status as reported by the firmware |
|
|
Indicator if sensor is being used for ML Perception |
|
|
Health of the lidar sensor’s host |
|
|
Determined health of the lidar sensor (ONLINE / WARNING / OFFLINE) |
|
|
Used to determine if a telemetry update has been received for the lidar sensor (seconds) |
|
|
Array of active Leaf Nodes for Aggregator when Distributed Perception in use |
|
|
Host name of the Leaf Node compute device |
|
|
Leaf Node ID when sensor is running as part a Distributed Perception Aggregator |
|
|
Leaf Node license details |
|
|
Leaf Node position (geo-coordinates if Lidar Hub world is set, otherwise cartesian coordinates in the world reference frame) |
|
|
x cartesian coordinates or longitude |
|
|
x cartesian coordinates or latitude |
|
|
height in meters |
|
|
Indicator of connectivity w/Perception Aggregator |
|
|
Perception Aggregator listening port |
|
|
Perception Aggregator’s web socket connection status to the Leaf Node |
|
|
Perception Aggregator’s REST API connection status to the Leaf Node |
|
|
Health of the Perception Aggregator |
|
|
Determined health of the Leaf Node (ONLINE / WARNING / OFFLINE) |
|
|
Ouster Solutions Agent details |
|
|
Ouster Solutions Agent software version |
|
|
Ouster Solutions Agent package version (DEB/RPM/etc.) |
|
|
Indication if the Ouster Solutions Agent is running |
|
|
Indicator if registry.ouster.com is available |
|
|
Latest package version available in registry.ouster.com |
|
|
Array of currently running Gemini Detect Docker Containers |
|
|
Perception Server details |
|
|
Perception Server software version |
|
|
Perception Server settings version |
|
|
Indication if the Perception Server is running ML Perception |
|
|
Indication if the Perception Server is running as a Distributed Perception Aggregator |
|
|
Indication if the Perception Server is running |
|
|
Indication if the Perception Server is paused on a replay |
|
|
Perception Server license details |
|
|
Number of Perception Server inclusion zones |
|
|
Number of Perception Server exclusion zones |
|
|
Perception Server configuration |
|
|
Perception Server extrinsics |
|
|
Event Zone Server details |
|
|
Event Zone Server software version |
|
|
Event Zone Server settings version |
|
|
Indication if the Event Zone Server is running |
|
|
Event Zone Server license details |
|
|
Number of Event Zone Server event zones |
|
|
Event Zone Server configuration |
|
|
Event Zone Server Event Zones |
|
|
Lidar Hub details |
|
|
Lidar Hub software version |
|
|
Lidar Hub settings version |
|
|
Lidar Hub license details |
|
|
Indication if the Lidar Hub is running |
|
|
Indication if Diagnostics are enabled |
|
|
Indication if Aggregation is enabled |
|
|
Number of configured MQTT publishers |
|
|
Number of configured TCP Relay Servers |
|
|
Number of configured Web Socket Servers |
|
|
List of configured Data Recorders |
|
|
Lidar Hub configuration |
|
|
Indication if Lidar Hub is running as a Scout (standalone w/out a Perception Server) |
|
|
Determined health of the Perception System (ONLINE / WARNING / OFFLINE) |
|
|
Indication if Lidar Hub is running as a Scout (standalone w/out a Perception Server) |
|
|
Version of this message |
Diagnostics Telemetry
Compute device, lidar sensor and software Telemetry will be generated at the diagnostics_interval_secs and published to the Gemini Portal and an internal memory-based broker for consumption by MQTT Publishers, TCP Relay Servers, Web Socket Servers and Data Recorders. The current attribute and telemetry diagnostics values can also be requested at any time via the Lidar Hub’s /diagnostics REST API resource.
Example Batching of one or more Frame(s) in a single Message
{
"diagnostics": [
{...},
{...},
{...}
]
}
Example Frame
{
"hardware_id": "*1234567890",
"latitude": 37.76466741329934,
"longitude": -122.4136976526134,
"azimuth": 57.6,
"compute": {
"cpu_utilization": 19.6,
"cpu_core_utilization": [
18.9,
18.7,
21.9,
16.8,
19.3,
16.9,
27.6,
16.9
],
"cpu_temperature_deg_c": 73,
"cpu_core_temperature_deg_c": [
73,
72,
69,
70
],
"gpu_utilization": 0,
"gpu_temperature_deg_c": 0,
"available_memory": 18890395648,
"available_disk_space": 762672287744
},
"lidars": [
{
"model": "OS1",
"serial_number": "992144000616",
"firmware": {
"input_current_ma": 704,
"input_voltage_mv": 24044,
"internal_temperature_deg_c": 0,
"phase_lock_status": "DISABLED",
"timestamp_ns": 1727503038782740
},
"position": {
"x": -122.4136976526134,
"y": 37.76466741329934,
"z": 3.42
},
"num_background_points": 83010,
"num_foreground_points": 416,
"num_failed_points": 865,
"num_no_return_points": 46781,
"num_zone_filtered_points": 4,
"num_ground_points": 0,
"num_clusters": 6,
"num_filtered_clusters": 0,
"percentage_incomplete_frames": 0,
"tilt_since_reset": 0.08322851640914329
}
],
"nodes": [
],
"solutions_agent": { },
"perception_server": {
"up_time": 0,
"num_objects": 0,
"num_websocket_clients": 3,
"num_tcp_clients": 3,
"largest_arrival_delta": 134,
"lowest_frame_rate": 5.979538020892506,
"mean_frame_rate": 10.872046880266147,
"benchmarks": [
],
"timestamp": 1660673730063520
},
"event_zone_server": {
"up_time": 0,
"num_occupations": 0,
"num_websocket_clients": 2,
"num_tcp_clients": 2,
"timestamp": 1660673730110978
},
"lidar_hub": {
"up_time": 338111.726481,
"cloud_ingress_mbps": 0.0000176,
"cloud_ingress_bytes": 132,
"cloud_ingress_entries": 1,
"cloud_egress_mbps": 0.0030373333333333333,
"cloud_egress_bytes": 22780,
"cloud_egress_entries": 6,
"mqtt_publishers_connected": 4,
"mqtt_publishers_mbps": 0.0028957333333333333,
"mqtt_publishers_bytes": 21718,
"mqtt_publishers_entries": 4,
"tcp_relay_server_connections": 0,
"tcp_relay_server_mbps": 0,
"tcp_relay_server_bytes": 0,
"tcp_relay_server_entries": 0,
"websocket_server_connections": 0,
"websocket_server_mbps": 0,
"websocket_server_bytes": 0,
"websocket_server_entries": 0,
"datarecorders_disk_bytes": 10573,
"datarecorders_disk_entries": 3,
"timestamp": 1710781920008258
},
"timestamp": 1660698930000000,
"is_scout": false,
"diagnostics_version": "2.0.0"
}
JSON Field Definitions
Field |
Format |
Description |
|---|---|---|
|
|
MAC Address of the compute device (MAC Address or Agent Locking Code) |
|
|
Lidar Hub world latitude |
|
|
Lidar Hub world longitude |
|
|
Lidar Hub world azimuth |
|
|
Compute Device details |
|
|
Total CPU utilization across all cores |
|
|
CPU utilization by core |
|
|
Average CPU temperature across all cores |
|
|
CPU temperature by core |
|
|
Total GPU utilization across all cores |
|
|
Average GPU temperature across all cores |
|
|
Available memory on the compute device (bytes) |
|
|
Available storage on the compute device (bytes) |
|
|
Array of active Lidar sensors |
|
|
Lidar sensor model |
|
|
Lidar senor serial number |
|
|
Lidar Firmware details |
|
|
Lidar sensor input current as reported by the firmware (milliamps) |
|
|
Lidar sensor input voltage as reported by the firmware (millivolts) |
|
|
Lidar sensor internal temperature as reported by the firmware (degrees celsius) |
|
|
Lidar sensor phase lock status as reported by the firmware |
|
|
Timestamp of these values as reported by the firmware (nanoseconds since Jan. 1, 1970) |
|
|
Lidar sensor position (geo-coordinates if Lidar Hub world is set, otherwise cartesian coordinates in the world reference frame) |
|
|
x cartesian coordinates or longitude |
|
|
x cartesian coordinates or latitude |
|
|
height in meters |
|
|
Number of background points for the last frame |
|
|
Number of foreground points for the last frame |
|
|
Number of failed points for the last frame |
|
|
Number of points not returned for the last frame |
|
|
Number of points filted by inclusion and exclusion zones for the last frame |
|
|
Number of points filtered as ground points for the last frame |
|
|
Number of clusters detected for the last frame |
|
|
Number of clusters remaining after filtering and merging for the last frame |
|
|
Percentage of incomplete frames |
|
|
Change in sensor tilt since last reset |
|
|
Array of active Leaf Nodes for Aggregator when Distributed Perception in use |
|
|
Ouster Solutions Agent details |
|
|
Perception Server details |
|
|
Perception Server run time since last started |
|
|
Number of objects currently being tracked by the Perception Server |
|
|
Number of web socket clients connected to the Perception Server |
|
|
Number of TCP clients connected to the Perception Server |
|
|
Difference between all the arrival times of all the sensors |
|
|
The longest time to process a frame in the last 10 seconds |
|
|
The average time to process a frame |
|
|
Perception Server benchmark statistics |
|
|
Timestamp of these values (microseconds since Jan. 1, 1970) |
|
|
Event Zone Server details |
|
|
Event Zone Server run time since last started |
|
|
Number of objects currently being positioned inside event zone(s) |
|
|
Number of web socket clients connected to the Event Zone Server |
|
|
Number of TCP clients connected to the Event Zone Server |
|
|
Timestamp of these values (microseconds since Jan. 1, 1970) |
|
|
Lidar Hub details |
|
|
Lidar Hub run time since last started |
|
|
Cloud inbound Megabits/Second of last timeseries |
|
|
Cloud inbound total Bytes of last timeseries |
|
|
Cloud inbound total Entries of last timeseries |
|
|
Cloud outbound Megabits/Second of last timeseries |
|
|
Cloud outbound total Bytes of last timeseries |
|
|
Cloud outbound total Entries of last timeseries |
|
|
Number of configured MQTT publishers connected to their endpoint |
|
|
MQTT Megabits/Second of last timeseries |
|
|
MQTT total Bytes of last timeseries |
|
|
MQTT total Entries of last timeseries |
|
|
Number of TCP clients connected to Lidar Hub TCP Relay Servers |
|
|
TCP Megabits/Second of last timeseries |
|
|
TCP total Bytes of last timeseries |
|
|
TCP total Entries of last timeseries |
|
|
Number of Web Socket clients connected to Lidar Hub Web Socket Servers |
|
|
Web Socket Megabits/Second of last timeseries |
|
|
Web Socket total Bytes of last timeseries |
|
|
Web Socket total Entries of last timeseries |
|
|
Data Recorder total Bytes of last timeseries |
|
|
Data Recorder total Entries of last timeseries |
|
|
Timestamp of these values (microseconds since Jan. 1, 1970) |
|
|
Timestamp of this message (microseconds since Jan. 1, 1970) |
|
|
Indication if Lidar Hub is running as a Scout (standalone w/out a Perception Server) |
|
|
Version of this message |
Dignostics Alerts
Lidar sensor and software Alerts will be published when first detected and when any update is reported to the internal memory-based broker for consumption by MQTT Publishers, TCP Relay Servers, Web Socket Servers and Data Recorders.
Example
{
"alerts": [
{
"active": true,
"category": "SHOT_LIMITING",
"cursor": 2833,
"alert_code": "0x0100000f",
"level": "WARNING",
"source_info": "OS1-992144000616",
"id": 13962805723535194000,
"msg": "Shot limiting mode is active. Laser power is partially attenuated;
please see user guide for heat sinking requirements.",
"msg_verbose": "Shot limiting has started.",
"first_occurred": 0,
"last_occurred": 0,
"active_count": 0
},
{
"active": true,
"category": "UDP_TRANSMISSION",
"cursor": 2822,
"alert_code": "0x01000016",
"level": "WARNING",
"source_info": "OS1-992144000616",
"id": 11061546793406626000,
"msg": "Could not send lidar data UDP packet to host; check that network is up.",
"msg_verbose": "Failed to send lidar UDP data to destination host 10.0.0.39:34642",
"first_occurred": 0,
"last_occurred": 0,
"active_count": 0
}
]
}
JSON Field Definitions
Field |
Format |
Description |
|---|---|---|
|
|
Array of active alerts |
|
|
Indication if the alert is still active |
|
|
Alert category (application specific) |
|
|
Alert cursor (lidar only) |
|
|
Alert code (application specific - hex) |
|
|
Alert level (application specific) |
|
|
Alert source information (application specific) |
|
|
Unique alert ID (application specific) |
|
|
Alert message |
|
|
Additional alert details (if any) |
|
|
First occurrence of the alert code (micro/nano seconds since Jan. 1, 1970) |
|
|
Last occurrence of the alert code (micro/nano seconds since Jan. 1, 1970) |
|
|
Total occurrences of the alert code |
Aggregation Module
The Lidar Hub includes an on-device Aggregation module that aggregates zone occupations by timeseries by object classification. A system-defined classification of “ALL” will also be aggregated for each zone representing an aggregate of all objects. The Aggregation module also aggregates all tracked objects by timeseries by object classification into a system-defined site-wide zone with an id of 0.
The Aggregation module generates three outputs:
TimeSeries: Detailed occupancy metrics by zone by classification reported every timeseries_secs.
RealTime: Summary occupancy metrics by zone by classification reported on change, but not more frequently than realtime_hertz.
Alerts: Zone occupancy alerts generated on rule violation, but not more frequently than realtime_hertz.
Configuration
The perception.aggregation section of the Lidar Hub settings is used for configuring the Aggregation module. By default, the Aggregation module is enabled with a timeseries interval of 60 seconds and a real-time interval of 1Hz.
Example
"perception": {
...
"aggregation": {
"timeseries_secs": 60.0,
"realtime_hertz": 1.0
}
}
Primary aggregation Fields
Field |
Format |
Description |
|---|---|---|
|
|
Aggregation module configuration |
|
|
Aggregation interval in seconds…a timeseries record is emitted every interval (DISABLED = 0) |
|
|
Frequency at which Aggregation will emit real-time updates (DISABLED = 0) |
Optional aggregation Fields
Field |
Format |
Description |
|---|---|---|
|
|
Frequency at which Aggregation will process Perception data (default = 2.0) |
|
|
Frequency at which real-time data will be published (default = 1.0) |
|
|
Frequency at which timeseries data will be published (default = 0.0) |
|
|
Timeout before exiting an object from a given zone in milliseconds (default = 2500) |
|
|
List of classifications to be excluded from Aggregation (default = [“PROSPECT”, “UNKNOWN”]) |
|
|
Path for the non-volatile storage of aggregation metrics…clear to disable (default = /opt/ouster/conf/data/storage) |
Aggregation RealTime Events
Event Zone real-time occupancy events will be generated in real-time and published at transmit_realtime_hertz to the internal memory-based broker for consumption by the Gemini Portal, MQTT Publishers, TCP Relay Servers, Web Socket Servers and Data Recorders.
Example Batching of one or more Frame(s) in a single Message
{
"aggregation_realtime": [
{...},
{...},
{...}
]
}
Example Frame
{
"timestamp": 1711227039549025,
"aggregation_realtime": [
{
"id": 1659467677889,
"name": "Office",
"timestamp": 1660664443771926,
"current_point_count": 350,
"classification_metrics": [
{
"description": "ALL",
"active_occupants": 115,
"total_visitors": 1200,
"total_visits": 1275,
"last_update": 1660664443771926,
"sub_classification_metrics": []
},
{
"description": "PERSON",
"active_occupants": 105,
"total_visitors": 1160,
"total_visits": 1235,
"last_update": 1660664443771926,
"sub_classification_metrics": [
{
"description": "pedestrian",
"active_occupants": 105,
"total_visitors": 1160,
"total_visits": 1235,
"last_update": 1660664443771926
}
]
}
]
},
{
"id": 1658947733821,
"name": "Desk",
"timestamp": 1660664443771926,
"current_point_count": -1,
"classification_metrics": [
{
"description": "ALL",
"active_occupants": 1,
"total_visitors": 1,
"total_visits": 2,
"last_update": 1660664443771926,
"sub_classification_metrics": []
},
{
"description": "PERSON",
"active_occupants": 1,
"total_visitors": 1,
"total_visits": 2,
"last_update": 1660664443771926,
"sub_classification_metrics": [
{
"description": "pedestrian",
"active_occupants": 1,
"total_visitors": 1,
"total_visits": 2,
"last_update": 1660664443771926
}
]
},
{
"description": "UNKNOWN",
"active_occupants": 1,
"total_visitors": 1,
"total_visits": 1,
"last_update": 1660664443771926,
"sub_classification_metrics": []
}
]
}
]
}
JSON Field Definitions
Field |
Format |
Definition |
|---|---|---|
|
|
Timestamp of when the update was generated. Units in microseconds since Jan. 1, 1970. |
|
|
Array of Event Zone real-time occupancy updates |
realtime update
Real-time occupancy for a given Event Zone.
Field |
Format |
Description |
|---|---|---|
|
|
Event Zone ID |
|
|
Event Zone name |
|
|
Timestamp of the real-time event (microseconds since Jan. 1, 1970) |
|
|
Number of points currently occupying the zone (-1 indicates this feature is disabled) |
|
|
Array of object classifications occupying the zone |
|
|
Object classification name (“ALL” indicates an aggregate of all classifications) |
|
|
Number of objects currently occupying the zone |
|
|
Total unique visitors that visited the zone at least once. Uniqueness is defined by each object’s uuid. |
|
|
Total visits to the zone. |
|
|
Last zone update (microseconds since Jan. 1, 1970) |
|
|
Optional array of object sub-classifications occupying the zone. ML Perception required. |
|
|
Object sub-classification name |
|
|
Number of objects currently occupying the zone |
|
|
Total unique visitors that visited the zone at least once. Uniqueness is defined by each object’s uuid. |
|
|
Total visits to the zone. |
|
|
Last zone update (microseconds since Jan. 1, 1970) |
Aggregation TimeSeries Aggregates
Zone timeseries aggregates will be generated every timeseries_secs and published at transmit_timeseries_hertz to the internal memory-based broker for consumption by the Gemini Portal, MQTT Publishers, TCP Relay Servers, Web Socket Servers and Data Recorders.
Example Batching of one or more Frame(s) in a single Message
{
"aggregation_timeseries": [
{...},
{...},
{...}
]
}
Example Frame
{
"timestamp": 1711227039549025,
"aggregation_timeseries": [
{
"id": 1659467677889,
"name": "Office",
"timestamp": 1660664440000000,
"current_point_count": 350,
"current_max_point_count": 870,
"current_avg_point_count": 125,
"overall_max_point_count": 1190,
"overall_avg_point_count": 85,
"classification_metrics": [
{
"description": "ALL",
"active_occupants": 1,
"max_active_occupants": 1,
"avg_active_occupants": 1,
"total_visitors": 5,
"total_visits": 5,
"new_visitors": 1,
"new_visits": 1,
"departed_visitors": 0,
"current_max_speed": 0.227,
"current_avg_speed": 0.122,
"overall_max_speed": 0.22669327197460112,
"overall_avg_speed": 0.122,
"current_avg_dwell": 0,
"overall_avg_dwell": 0,
"last_update": 1660664449970829,
"sub_classification_metrics": []
},
{
"description": "PERSON",
"active_occupants": 1,
"max_active_occupants": 1,
"avg_active_occupants": 1,
"total_visitors": 5,
"total_visits": 5,
"new_visitors": 1,
"new_visits": 1,
"departed_visitors": 0,
"current_max_speed": 0.227,
"current_avg_speed": 0.122,
"overall_max_speed": 0.22669327197460112,
"overall_avg_speed": 0.122,
"current_avg_dwell": 0,
"overall_avg_dwell": 0,
"last_update": 1660664449970829,
"sub_classification_metrics": [
{
"description": "pedestrian",
"active_occupants": 1,
"max_active_occupants": 1,
"avg_active_occupants": 1,
"total_visitors": 5,
"total_visits": 5,
"new_visitors": 1,
"new_visits": 1,
"departed_visitors": 0,
"current_max_speed": 0.227,
"current_avg_speed": 0.122,
"overall_max_speed": 0.22669327197460112,
"overall_avg_speed": 0.122,
"current_avg_dwell": 0,
"overall_avg_dwell": 0,
"last_update": 1660664449970829
}
]
}
]
},
{
"id": 1658947733821,
"name": "Desk",
"timestamp": 1660664440000000,
"current_point_count": -1,
"current_max_point_count": -1,
"current_avg_point_count": 0,
"overall_max_point_count": -1,
"overall_avg_point_count": 0,
"classification_metrics": [
{
"description": "ALL",
"active_occupants": 1,
"max_active_occupants": 1,
"avg_active_occupants": 1,
"total_visitors": 5,
"total_visits": 5,
"new_visitors": 1,
"new_visits": 1,
"departed_visitors": 0,
"current_max_speed": 0.227,
"current_avg_speed": 0.122,
"overall_max_speed": 0.22669327197460112,
"overall_avg_speed": 0.122,
"current_avg_dwell": 0,
"overall_avg_dwell": 0,
"last_update": 1660664449970829,
"sub_classification_metrics": []
},
{
"description": "PERSON",
"active_occupants": 1,
"max_active_occupants": 1,
"avg_active_occupants": 1,
"total_visitors": 5,
"total_visits": 5,
"new_visitors": 1,
"new_visits": 1,
"departed_visitors": 0,
"current_max_speed": 0.227,
"current_avg_speed": 0.122,
"overall_max_speed": 0.22669327197460112,
"overall_avg_speed": 0.122,
"current_avg_dwell": 0,
"overall_avg_dwell": 0,
"last_update": 1660664449970829,
"sub_classification_metrics": [
{
"description": "pedestrian",
"active_occupants": 1,
"max_active_occupants": 1,
"avg_active_occupants": 1,
"total_visitors": 5,
"total_visits": 5,
"new_visitors": 1,
"new_visits": 1,
"departed_visitors": 0,
"current_max_speed": 0.227,
"current_avg_speed": 0.122,
"overall_max_speed": 0.22669327197460112,
"overall_avg_speed": 0.122,
"current_avg_dwell": 0,
"overall_avg_dwell": 0,
"last_update": 1660664449970829,
}
]
}
]
},
{
"id": 0,
"name": "Edge-FF:FF:FF:FF:FF:FF",
"timestamp": 1660664440000000,
"classification_metrics": [
{
"description": "ALL",
"active_occupants": 1,
"max_active_occupants": 1,
"avg_active_occupants": 1,
"total_visitors": 5,
"total_visits": 5,
"new_visitors": 1,
"new_visits": 1,
"departed_visitors": 0,
"current_max_speed": 0.227,
"current_avg_speed": 0.124,
"overall_max_speed": 0.22669327197460112,
"overall_avg_speed": 0.124,
"current_avg_dwell": 0,
"overall_avg_dwell": 0,
"last_update": 1660664449970829,
"sub_classification_metrics": []
},
{
"description": "PERSON",
"active_occupants": 1,
"max_active_occupants": 1,
"avg_active_occupants": 1,
"total_visitors": 1,
"total_visits": 1,
"new_visitors": 1,
"new_visits": 1,
"departed_visitors": 0,
"current_max_speed": 0.227,
"current_avg_speed": 0.124,
"overall_max_speed": 0.22669327197460112,
"overall_avg_speed": 0.124,
"current_avg_dwell": 0,
"overall_avg_dwell": 0,
"last_update": 1660664449970829,
"sub_classification_metrics": [
{
"description": "pedestrian",
"active_occupants": 1,
"max_active_occupants": 1,
"avg_active_occupants": 1,
"total_visitors": 1,
"total_visits": 1,
"new_visitors": 1,
"new_visits": 1,
"departed_visitors": 0,
"current_max_speed": 0.227,
"current_avg_speed": 0.124,
"overall_max_speed": 0.22669327197460112,
"overall_avg_speed": 0.124,
"current_avg_dwell": 0,
"overall_avg_dwell": 0,
"last_update": 1660664449970829
}
]
}
]
}
]
}
JSON Field Definitions
Field |
Format |
Definition |
|---|---|---|
timestamp |
int |
Timestamp of when the update was generated. Units in microseconds since Jan. 1, 1970. |
aggregation_timeseries |
array |
Array of Event Zone timeseries aggregates |
timeseries aggregates
Timeseries aggregates for a given Event Zone.
Field |
Format |
Description |
|---|---|---|
|
|
Event Zone ID |
|
|
Event Zone name |
|
|
Number of points currently occupying the zone (-1 indicates this feature is disabled) |
|
|
Maximum number of points occupying the zone in this timeseries (-1 indicates this feature is disabled) |
|
|
Average number of points occupying the zone in this timeseries |
|
|
Maximum number of points occupying the zone (-1 indicates this feature is disabled) |
|
|
Average number of points occupying the zone |
|
|
Timestamp of the timeseries aggregate (microseconds since Jan. 1, 1970) |
|
|
Array of object classifications occupying the zone |
|
|
Object classification name (“ALL” is an aggregate of all classifications) |
|
|
Number of objects currently occupying the zone |
|
|
Maximum number of objects occupying the zone in this timeseries |
|
|
Average number of objects occupying the zone in this timeseries |
|
|
Total unique visitors to the zone. Uniqueness is defined by each object’s uuid. |
|
|
Total visits to the zone |
|
|
New unique visitors to the zone in this timeseries. Uniqueness is defined by each object’s uuid. |
|
|
New visits to the zone in this timeseries |
|
|
Total unique visitors that left the zone in this timeseries. Uniqueness is defined by each object’s uuid. |
|
|
Maximum speed observed in the zone in this timeseries |
|
|
Average speed observed in the zone in this timeseries |
|
|
Maximum speed observed in the zone |
|
|
Average speed observed in the zone |
|
|
Average dwell observed in the zone in this timeseries |
|
|
Average dwell observed in the zone |
|
|
Last zone update (microseconds since Jan. 1, 1970) |
|
|
Optional array of object sub-classifications occupying the zone. ML Perception required. |
|
|
Object sub-classification name |
|
|
Number of objects currently occupying the zone |
|
|
Maximum number of objects occupying the zone in this timeseries |
|
|
Average number of objects occupying the zone in this timeseries |
|
|
Total unique visitors to the zone. Uniqueness is defined by each object’s uuid. |
|
|
Total visits to the zone |
|
|
New unique visitors to the zone in this timeseries. Uniqueness is defined by each object’s uuid. |
|
|
New visits to the zone in this timeseries |
|
|
Total unique visitors that left the zone in this timeseries. Uniqueness is defined by each object’s uuid. |
|
|
Maximum speed observed in the zone in this timeseries |
|
|
Average speed observed in the zone in this timeseries |
|
|
Maximum speed observed in the zone |
|
|
Average speed observed in the zone |
|
|
Average dwell observed in the zone in this timeseries |
|
|
Average dwell observed in the zone |
|
|
Last zone update (microseconds since Jan. 1, 1970) |
Aggregation Alerts
The Aggregation module will generate real-time alerts whenever the occupancy of a zone exceeds a pre-defined Zone Alert condition set in a zone’s metadata. These alerts can be polled at any time via the Lidar Hub’s /event_zones/alerts REST API resource.
Example
"alert": [
{
"id": 1234567890,
"name": "Warning Zone",
"severity": "WARNING",
"occupancy": 3,
"message": "Zone is not empty"
},
{
"id": 0987654321,
"name": "Crosswalk Zone",
"severity": "MAJOR",
"occupancy": 1,
"message": "Vehicle detected in crosswalk!"
}
]
JSON Field Definitions
Field |
Format |
Definition |
|---|---|---|
|
|
Array of real-time occupancy alerts |
|
|
Event Zone ID |
|
|
Event Zone name |
|
|
Severity of the event |
|
|
Current occupancy of the Event Zone |
|
|
Message associated with the alert |
Bandwidth Requirements
The following table outlines bandwidth requirements for the output object list and occupation data streams coming out of Detect. These bandwidth requirements apply to the data coming out of the TCP relay server or MQTT. See Connecting to Output section for more details on configuring these.
The bandwidth requirements assume the messages are coming out at 10 Hz. Any downsampling applied in the lidarhub will reduce the bandwidth by the same factor at which it is applied (i.e., If lidarhub downsampling is configured to 1 Hz, the numbers below can be reduced by a factor of 10). See JSON Data Streams w/Down-sampling, Batching & Field Mapping for more details on configuring down-sampling in the lidarhub.
The bandwidth required for the object list data is dependent on the number of objects being detected. The general formula is 10 KB for every object per second. The table below shows the bandwidth requirements for 10, 100, and 500 objects.
Number of Objects Detected |
Bandwidth Required |
|---|---|
10 |
98 KB/s |
100 |
975 KB/s |
500 |
5 MB/s |
The bandwidth required for the occupations data depends on the number of objects in event zones and the number of zones. The table below shows the bandwidth required for different variations of these parameters.
Number of Zones |
Number of Objects in Zones |
Bandwidth Required |
|---|---|---|
10 |
10 |
1.0 MB/s |
10 |
100 |
10 MB/s |
10 |
500 |
48 MB/s |
100 |
10 |
10 MB/s |
100 |
100 |
96 MB/s |
100 |
500 |
480 MB/s |
JSON Data Streams w/Down-sampling, Batching & Field Mapping
One or more MQTT Publishers and/or TCP Relay Servers may be configured for supported JSON data streams (object_list | occupations | clusters | aggregation_realtime | aggregation_timeseries | diagnostics). MQTT Publishers and TCP Relay Servers enable the down-sampling and batching of JSON output, as well as custom field mapping, filtering and decimal precision of floating-point values.
Since batching is inherent to this feature, transmissions are wrapped in a JSON array with the data stream name as the field name. Although this wrapping is enabled by default, it can be overridden by setting “return_as_array”: false in the specific MQTT Publisher/TCP Relay Server configuration. Please note that a malformed JSON message will be received if return_as_array is disabled and batching returns more than one frame.
Example Batching
{
"object_list": [
{...},
{...},
{...}
]
}
object_list, occupations and diagnostics JSON fields can be filtered and (optionally) renamed by setting field_mappings to a dictionary of key/value pairs, where the key is the field name and the value is the new name (leaving blank will result in no renaming). Once field_mappings are applied, all desired fields must be defined in the field_mappings dictionary. If the field is an object, list or dictionary, the entire object, list or dictionary will be returned…unless one of its fields are added to the field_mappings.
Example field_mappings
{
"timestamp": "ts",
"objects": "objs",
"classification": "typ",
"position": "pos",
"velocity": "velo",
"dimensions": "dim",
"x": "x",
"y": "y",
"length": "l",
"width": "w",
"height": "h"
}
Once field_mappings are in use, decimal precision for floating-point values can be defined by setting “decimal_precision”. decimal_precision will only apply to fields defined in field_mappings and does NOT automatically propagate to nested fields in objects, lists or dictionaries. A value of -1 disables decimal_precision.
MQTT Publisher Configuration
The mqtt_publishers section of the Lidar Hub settings is used for configuring one or more MQTT Publisher(s). By default, no active MQTT Publishers are pre-configured, but an example is included for reference.
Multiple publishing threads can be configured for a given MQTT Publisher. If a publisher falls behind, additional publishing threads will be launched until max_publishers is reached. A high_water_mark controls how far behind publishing can fall before messages are dropped. Once publishing is caught back up, the additional publishing threads will gradually be terminated in attempts to minimize resources while maintaining pace with the velocity of data.
${device_name} and ${device_label} are special variables that can be used in-line when defining the topic of an MQTT Publisher. The variable is replaced with its equivalent value at runtime.
Example
"mqtt_publishers": [
{
"source": "object_list",
"host": "mqttbroker.mycompany.com",
"port": 1883,
"user_name": "",
"password": "",
"topic": "/v1/${device_name}/object_list",
"qos": 1,
"convert_to_geo_coordinates": false,
"data_hertz": 1,
"transmit_hertz": 1
},
{
...
}
]
Primary mqtt_publishers Fields
Field |
Format |
Description |
|---|---|---|
|
|
Array of MQTT Publishers |
|
|
Comma-delimited list of desired JSON data stream source(s) (object_list, occupations, aggregation_realtime, aggregation_timeseries, diagnostics) |
|
|
MQTT Broker host name/IP address |
|
|
MQTT Broker port number (default = 1883) |
|
|
MQTT Broker username to authenticate with [MQTT-3.1.3-11] (default = “”) |
|
|
MQTT Broker password to authenticate with. Optional, set to “” if not required. (default = “”) |
|
|
MQTT Broker topic to publish to |
|
|
Quality of Service (0 = At most once, 1 = At least once (default), 2 = Exactly once) |
|
|
Converts cartesian coordinates to WGS84 longitude/latitude coordinates (default = false) |
|
|
Down-sampling Hz (a value of 0 disables down-sampling) |
|
|
Transmission Hz (a value of 0 sends immediately, while a value greater than data_hertz invokes batching) |
Optional mqtt_publishers Fields
Field |
Format |
Description |
|---|---|---|
|
|
User-defined MQTT Client ID. A uuid will be generated and used as the Client ID if one is not defined. “max_publishers” is limited to one when a user-defined Client ID is provided. |
|
|
Indicator if the MQTT Publisher should use TLS (default = false) |
|
|
Name of the Certificate Authority certificate file uploaded via the
“POST /lidar-hub/api/v1/certificate” API endpoint that is to be treated
as trusted by this publisher. If this settings is defined without the
|
|
|
Name of the certfile uploaded via the “POST /lidar-hub/api/v1/certificate”
API endpoint pointing to the PEM encoded publisher certificate. If this setting
is defined in combination with the |
|
|
Name of the keyfile uploaded via the “POST /lidar-hub/api/v1/certificate”
API endpoint pointing to the PEM encoded publisher private keys. If this setting
is defined in combination with the |
|
|
Seconds to wait for a connection to be established to the MQTT Broker (default = 5.0) |
|
|
Delay in seconds before retrying a failed connection to the MQTT Broker (default = 60.0) |
|
|
Controls the wrapping of transmissions into a well-formed JSON array (default = true) |
|
|
JSON field filtering and renaming (default = {}) |
|
|
Decimal precision for floating-point values (default = -1 (disabled)) |
|
|
Minimum number of publishing threads (default = 1) |
|
|
Maximum number of publishing threads (default = 3) |
|
|
Maximum retry attempts to publish a given message (default = 2) |
|
|
Maximum number of messages pending to be published (default = 100) |
|
|
Restore messages to send queue if max_retries is exceeded. If the high_water_mark is exceeded, the message will be dropped. (default = true) |
|
|
Interval to send heartbeat_message when source stream is inactive (default = 0 (disabled)) |
|
|
Message to transmit when source stream is inactive (default = “{}”) |
TCP Relay Server Configuration
The tcp_servers section of the Lidar Hub settings is used for configuring one or more TCP Relay Server(s). By default, TCP Relay Servers are pre-configured for object_list and occupations JSON data streams at 1Hz on ports 3302 and 3303 respectively.
Example
"tcp_servers": [
{
"source": "object_list",
"port": 3302,
"convert_to_geo_coordinates": false,
"data_hertz": 0,
"transmit_hertz": 0
},
{
"source": "occupations",
"port": 3303,
"convert_to_geo_coordinates": false,
"data_hertz": 0,
"transmit_hertz": 0
},
{
...
}
]
Primary tcp_servers Fields
Field |
Format |
Description |
|---|---|---|
|
|
Array of TCP Relay Servers |
|
|
Comma-delimited list of desired JSON data stream source(s) (object_list, occupations, aggregation_realtime, aggregation_timeseries, diagnostics) |
|
|
TCP Relay Server listening port |
|
|
Converts cartesian coordinates to WGS84 longitude/latitude coordinates (default = false) |
|
|
Down-sampling Hz (a value of 0 disables down-sampling) |
|
|
Transmission Hz (a value of 0 sends immediately while a value greater than data_hertz invokes batching) |
Optional tcp_servers Fields
Field |
Format |
Description |
|---|---|---|
|
|
Controls the wrapping of transmissions into a well-formed JSON array (default = true) |
|
|
JSON field filtering and renaming (default = {}) |
|
|
Decimal precision for floating-point values (default = -1 (disabled)) |
|
|
Interval to send heartbeat_message when source stream is inactive (default = 0 (disabled)) |
|
|
Message to transmit when source stream is inactive (default = “{}”) |
Web Socket Server Configuration
The websocket_servers section of the Lidar Hub settings is used for configuring one or more Web Socket Server(s) for internal use.
Example
"websocket_servers": [
]
Primary websocket_servers Fields
Field |
Format |
Description |
|---|---|---|
|
|
Array of Web Socket Servers |
|
|
Comma-delimited list of desired JSON data stream source(s) (object_list, occupations, aggregation_realtime, aggregation_timeseries, diagnostics, enrichments) |
|
|
Web Socket Server listening port |
|
|
Down-sampling Hz (a value of 0 disables down-sampling) |
|
|
Transmission Hz (a value of 0 sends immediately while a value greater than data_hertz invokes batching) |
Optional websocket_servers Fields
Field |
Format |
Description |
|---|---|---|
|
|
Converts cartesian coordinates to WGS84 longitude/latitude coordinates |
|
|
Controls the wrapping of transmissions into a well-formed JSON array (default = true) |
|
|
JSON field filtering and renaming (default = {}) |
|
|
Decimal precision for floating-point values (default = -1 (disabled)) |
|
|
Interval to send heartbeat_message when source stream is inactive (default = 0 (disabled)) |
|
|
Message to transmit when source stream is inactive (default = “{}”) |
Event Recorder
The Lidar Hub Event Recorder can generate recordings in real-time when the occupancy of a zone exceeds a pre-defined Zone Event Recorder condition set in a zone’s metadata.
The Event Data Recorder maintains a rolling buffer of perception output for the recording of activity before an event occurs. Completed recordings are uploaded to the Ouster Gemini Portal (if configured) for playback. The module also supports a retention period, compression and purge strategies for handling recordings when the device is offline/not configured to upload to the Gemini Portal. By default, recordings are saved to disk before they are uploaded to the Gemini Portal. In the event a recording fails to upload to the Gemini Portal, the Event Recorder vacuum (enabled by default) will continiously reattempt to upload recording(s) until successful or disabled.
Configuration
The event_recorder section of the Lidar Hub settings is used for configuring the Event Data Recorder module. By default, Data Recording is disabled for all features.
When both “json_data”.”object_list_enabled” and “binary_data”.”trackedobjects_enabled” are set, “binary_data”.”trackedobjects_enabled” will take precedence.
When both “json_data”.”occupations_enabled” and “binary_data”.”zone_events_enabled” are set, “binary_data”.”zone_events_enabled” will take precedence.
The following options must at least be set for recordings that are intended to be played with the Ouster Gemini Portal Player:
“binary_data”.”clusters_enabled”: true
“binary_data”.”trackedobjects_enabled”: true
“binary_data”.”zone_events_enabled”: true
Example
"event_recorder": {
"binary_data": {
"pointclouds_downsampling": 1,
"clusters_enabled": true,
"trackedobjects_enabled": true,
"images_enabled": true,
"zone_events_enabled": true
},
"max_rolling_buffer_secs": 120.0,
"reset_on_timeout": false,
"retention_count": 0,
"min_available_disk": 0.10,
"purge_strategy": "oldest",
"use_compression": true
}
Primary data_recorder Fields
Field |
Format |
Description |
|---|---|---|
|
|
Flatbuf data to be included in each Event Recording |
|
|
Downsampling factor of background point clouds (default = 1 (none)) |
|
|
Indicator if flatBuf clusters should be captured in recordings (default = true) |
|
|
Indicator if flatBuf tracked objects should be captured in recordings (default = true) |
|
|
Indicator if NearIR/CalRef images should be captured in recordings (default = true) |
|
|
Indicator if JSON zone events should be captured in recordings (default = true) |
|
|
Maximum length of perception output rolling buffer in seconds (default = 120.0) |
|
|
Number of recordings to retain (0 = unlimited) |
|
|
Minimal percentage of available storage before implementing the purge_strategy (default = 0.10 (10%)) |
|
|
Recording purge strategy to invoke when minimum available storage is reached oldest/newest/disable (default = oldest) |
|
|
Indicator if completed recordings should be compressed w/GZip (default = true) |
Optional data_recorder Fields
Field |
Format |
Description |
|---|---|---|
|
|
JSON data to be included in each Event Recording |
|
|
Indicator if JSON object lists should be captured in recordings (default = false) |
|
|
Indicator if JSON occupations should be captured in recordings (default = false) |
|
|
Indicator if JSON aggregation timeseries output should be captured in recordings (default = false) |
|
|
Indicator if JSON aggregation real-time output should be captured in recordings (default = false) |
|
|
Indicator if JSON diagnostics telemetry and alerts output should be captured in recordings (default = false) |
|
|
Maximum length of any event recording in seconds. This value supersedes Zone Event Recorder configuration(s) (default = 900) |
|
|
Indicator if all events will automatically re-trigger after a timeout. This value can be overridden by Zone Event Recorder configuration(s) (default = false) |
|
|
Indicator if a custom post-processor will be invoked after an event clears (default = false). There is currently one custom post-processor and it applies to all event types. If enabled, this custom post-processor will generate an additional event recording file consisting of Object List Data filtered for the object that triggered the event (offender) for the duration of the event. This additional event recording file can be found in the “event_recorder”.”log_path”. |
|
|
Indicator if completed Event Recordings will be uploaded to the Gemini Portal (default = true) |
|
|
Indicator if Event Recordings successfully uploaded to the Gemini Portal will be removed from disk (default = true) |
|
|
Minimum recording age in seconds to be considered for vacuuming (default = 3600). A value of 0 disables the Event Recorder vacuum. |
|
|
Delay in seconds before retrying a failed vacuum (default = 900) |
|
|
Indicator if the vacuum will attempt to (re)generate recording metadata if missing or corrupt (default = false) |
|
|
Recordings path (default = /opt/ouster/conf/data/events/) |
User Recordings
Users and applications can manually trigger Event Recordings via the LidarHub REST API:
https://<<host>>/api/v1/user_recording/start
The body of the API POST is used to configure the Event Recording
Example
{
"allow_concurrent": false,
"event_buffer_seconds": 5,
"id": "",
"zone_id": 0,
"zone_name": "",
"offender_id": "",
"start_timestamp": 0,
"max_recording_length_secs": 10,
"meta_data": {},
"name": "",
"static_viewer_overrides": {},
"severity": "INDETERMINATE"
}
User Recording Configuration Fields
Field |
Format |
Description |
|---|---|---|
|
|
Optional user defined ID of the recording. If not assigned, the id will be set to a UUID. |
|
|
Optional user defined Name of the recording. If a valid zone_id or zone_name is provided, this will be overridden with the Event Zone Name and the recording description will be set to the request name. The name will be set to User Recording at [datetime.utcnow()] if not assigned. |
|
|
Severity of the event ( |
|
|
Optional ID of the Gemini Detect Event Zone associated with the recording. Either zone_id or zone_name should be defined, but not both. If both zone_id and zone_name are defined, zone_id will take precedence. |
|
|
Optional Name of the Gemini Detect Event Zone associated with the recording. Either zone_id or zone_name should be defined, but not both. If both zone_id and zone_name are defined, zone_id will take precedence. |
|
|
Optional id or uuid of the object associated with the recording. |
|
|
Optional start timestamp of the event within LidarHub “event_recorder”.”max_rolling_buffer_secs” (Units in microseconds since Jan. 1, 1970). |
|
|
Optional time in seconds to include in the recording prior to trigger and up to LidarHub “event_recorder”.”max_rolling_buffer_secs” |
|
|
Maximum length of the recording in seconds (less than or equal). This time is exclusive of “event_buffer_seconds”. |
|
|
Allows/prevents concurrent User Event Recordings. |
|
|
Optional user defined meta data associated with the recording (typically JSON). |
|
|
Optional event playback overrides (reserved for internal use). |
Accessing User Event Recordings
Event recordings can be accessed/downloaded at the following URL:
https://<<host>>/data/events/
PCAP Recordings
Users and applications can manually trigger PCAP Recordings via the LidarHub REST API:
https://<<host>>/api/v1/pcap_recording/start
The body of the API POST is used to configure the PCAP Recording
Example
{
"id": "",
"name": "",
"severity": "INDETERMINATE",
"zone_id": 0,
"zone_name": "",
"offender_id": "",
"max_recording_length_secs": 10,
"meta_data": {}
}
PCAP Recording Configuration Fields
Field |
Format |
Description |
|---|---|---|
|
|
Optional user defined ID of the recording. If not assigned, the id will be set to a UUID. |
|
|
Optional user defined Name of the recording. If a valid zone_id or zone_name is provided, this will be overridden with the Event Zone Name and the recording description will be set to the request name. The name will be set to User Recording at [datetime.utcnow()] if not assigned. |
|
|
Severity of the event ( |
|
|
Optional ID of the Gemini Detect Event Zone associated with the recording. Either zone_id or zone_name should be defined, but not both. If both zone_id and zone_name are defined, zone_id will take precedence. |
|
|
Optional Name of the Gemini Detect Event Zone associated with the recording. Either zone_id or zone_name should be defined, but not both. If both zone_id and zone_name are defined, zone_id will take precedence. |
|
|
Optional id or uuid of the object associated with the recording. |
|
|
Maximum length of the recording in seconds (less than or equal). |
|
|
Optional user defined meta data associated with the recording (typically JSON). |
Accessing PCAP Recordings
PCAP recordings can be accessed/downloaded at the following URL:
https://<<host>>/data/
JSON Data Recorder
The Lidar Hub has an on-device JSON Data Recorder module with timed-rotation, retention period, compression and purge strategies. Object Lists, Occupations, Aggregation and Diagnostics will be recorded into a combined file. By default, recordings are saved to /opt/ouster/conf/data/recordings/.
Configuration
The json_data_recorder section of the Lidar Hub settings is used for configuring the JSON Data Recorder module. By default, Data Recording is disabled for all features. Data Recording can also be disabled by setting “rotation_minutes” = 0.
Example
"json_data_recorder": {
"object_list_enabled": false,
"occupations_enabled": false,
"aggregation_timeseries_enabled": false,
"aggregation_realtime_enabled": false,
"diagnostics_enabled": false,
"rotation_minutes": 5,
"retention_count": 288,
"min_available_disk": 0.10,
"purge_strategy": "oldest",
"use_compression": true
}
Primary data_recorder Fields
Field |
Format |
Description |
|---|---|---|
|
|
Flag indicating if JSON object lists should be recorded (default = False) |
|
|
Flag indicating if JSON occupations should be recorded (default = False) |
|
|
Flag indicating if JSON aggregation realtime output should be recorded (default = False) |
|
|
Flag indicating if JSON aggregation timeseries output should be recorded (default = False) |
|
|
Flag indicating if JSON diagnostics telemetry and alerts output should be recorded (default = False) |
|
|
Data recording file rotation interval in fractional minutes…set to 0 to disable data recording (default = 5.0) |
|
|
Number of recordings to retain (default = 288 (1 day)) |
|
|
Minimal percentage of available storage before implementing the purge_strategy (default = 0.35 (35%)) |
|
|
Recording purge strategy to invoke when minimum available storage is reached oldest/newest/disable (default = oldest) |
|
|
Flag indicating if recordings should be compressed w/GZip after rotation (default = true) |
Optional data_recorder Fields
Field |
Format |
Description |
|---|---|---|
|
|
Recordings path (default = /opt/ouster/conf/data/recordings/) |
Accessing JSON Data Recordings
JSON data recordings can be accessed/downloaded at the following URL:
https://<<host>>/data/recordings/
Binary Data Recorder
The Lidar Hub has an on-device Binary Data Recorder module with timed-rotation, retention period, compression and purge strategies. Point Clouds, Clusters, Tracked Objects and Images are recorded as flatbuf messages, while Event Zone Server Zone Events are stored as JSON messages. All messages are merged into a combined file in binary format, where each message is prepended with a 4-byte unsigned length (big-endian). By default, recordings are saved to /opt/ouster/conf/data/recordings/.
Configuration
The binary_data_recorder section of the Lidar Hub settings is used for configuring the Binary Data Recorder module. By default, Data Recording is disabled for all features. Data Recording can also be disabled by setting rotation_minutes = 0.
Example
"data_recorder": {
"pointclouds_enabled": false,
"clusters_enabled": false,
"trackedobjects_enabled": false,
"images_enabled": false,
"zone_events_enabled": false,
"rotation_minutes": 5,
"retention_count": 288,
"min_available_disk": 0.35,
"purge_strategy": "oldest",
"use_compression": true
}
Primary data_recorder Fields
Field |
Format |
Description |
|---|---|---|
|
|
Flag indicating if FlatBuf point clouds should be recorded (default = False) |
|
|
Flag indicating if FlatBuf clusters should be recorded (default = False) |
|
|
Flag indicating if FlatBuf tracked objects should be recorded (default = False) |
|
|
Flag indicating if NearIR/CalRef images should be captured in recordings (default = False) |
|
|
Flag indicating if JSON zone events should be recorded (default = False) |
|
|
Data recording file rotation interval in fractional minutes…set to 0 to disable data recording (default = 5.0) |
|
|
Number of recordings to retain (default = 288 (1 day)) |
|
|
Minimal percentage of available storage before implementing the purge_strategy (default = 0.35 (35%)) |
|
|
Recording purge strategy to invoke when minimum available storage is reached oldest/newest/disable (default = oldest) |
|
|
Flag indicating if recordings should be compressed w/GZip after rotation (default = true) |
Optional data_recorder Fields
Field |
Format |
Description |
|---|---|---|
|
|
Recordings path (default = /opt/ouster/conf/data/recordings/) |
Accessing Binary Data Recordings
Binary data recordings can be accessed/downloaded at the following URL:
https://<<host>>/data/recordings/
Utilities
The Lidar Hub includes utilities to assist with verifying that the MQTT Publishers and TCP Relay Servers configured are producing output as expected.
MQTT Echo
A browser-based utility to test configured MQTT Publisher(s) can be found at https://<<host>>/lidar-hub/mqtt_echo
Select the desired pre-configured Publisher from the drop down.
Edit the auto-filled fields if desired.
Click Connect to subscribe to the MQTT Topic…data published to topic will be received and appended to the data pane (max 25 entries).
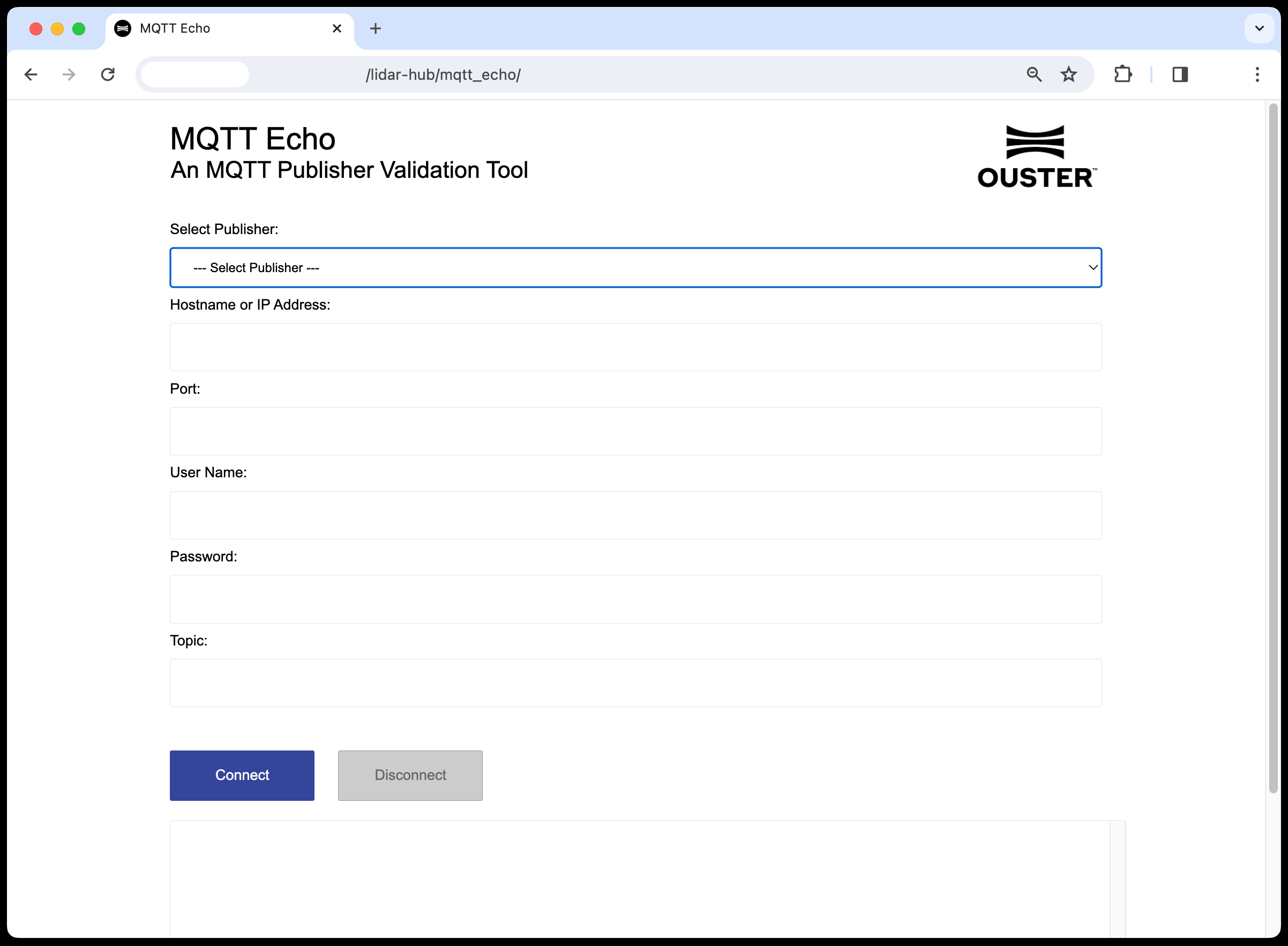
TCP Echo
A browser-based utility to test configured TCP Relay Servers can be found at https://<<host>>/lidar-hub/tcp_echo
Select the desired pre-configured Server from the drop down.
Edit the auto-filled fields if desired.
Click Connect to connect to the TCP Server…data received from the server will be appended to the data pane (max 25 entries).
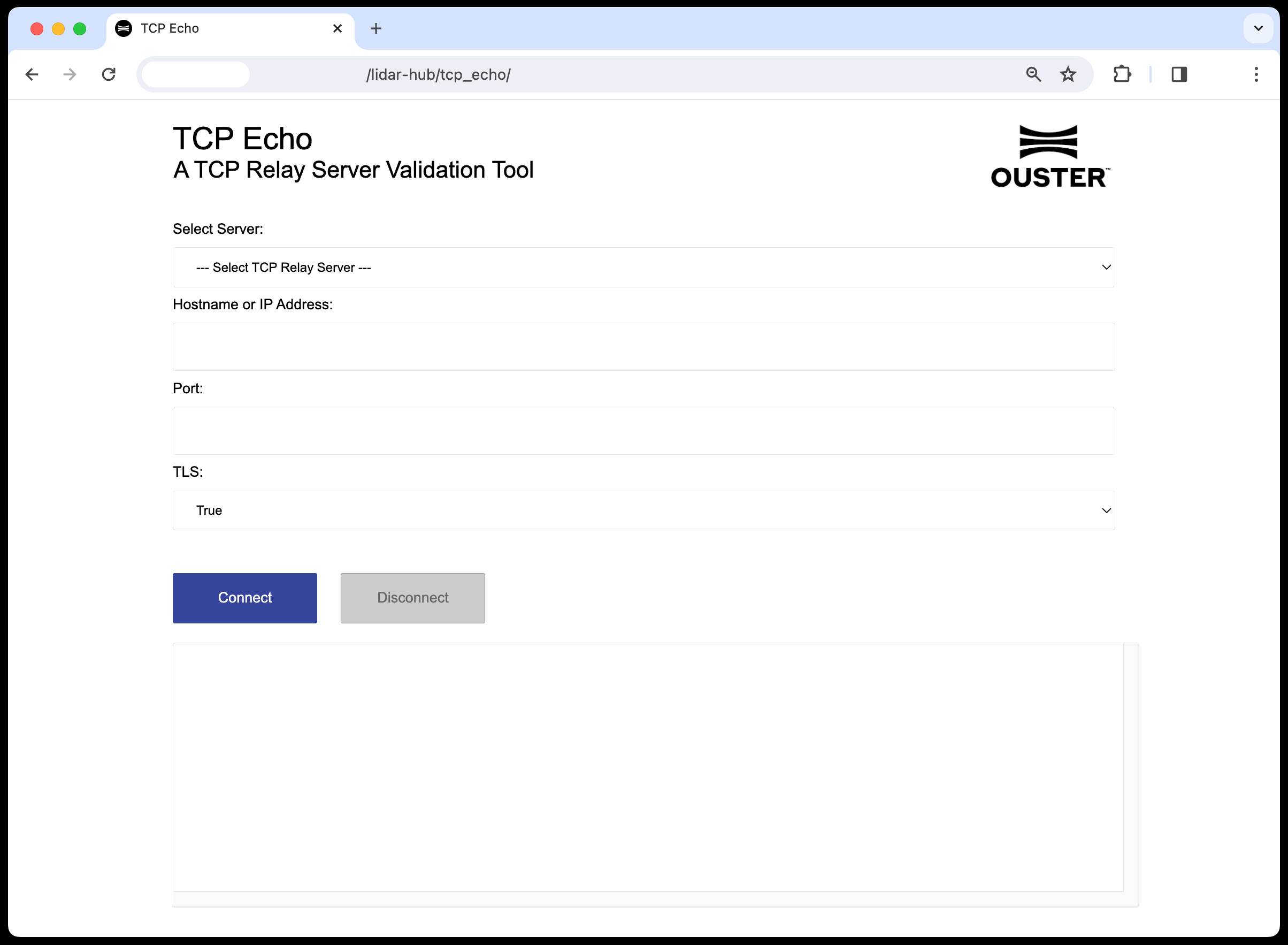
RESTful API Specification
Diagnostics
Settings
- GET /lidar-hub/api/v1/cloud_streaming
Get the Cloud Streaming Configuration
- Status Codes:
200 OK – OK
- PUT /lidar-hub/api/v1/cloud_streaming
Set the Cloud Streaming Configuration
- Query Parameters:
cloudviewer_data_hertz (number) – Cloud Viewer data_hertz
portal2d_data_hertz (number) – Portal 2D data_hertz
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
- PUT /lidar-hub/api/v1/default_settings
Restore application settings to default values
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
- POST /lidar-hub/api/v1/settings
Set all application settings.
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
- PUT /lidar-hub/api/v1/world
Set the World Geo-Coordinates
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
Cloud Storage
- POST /lidar-hub/api/v1/cloud_storage
Add/Update a Cloud Storage Profile
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
- PUT /lidar-hub/api/v1/cloud_storage
Set The Active Cloud Storage Profile
- Query Parameters:
profile (string) – Cloud Storage Profile.
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
Cloud Connectivity
- POST /lidar-hub/api/v1/certificate
Save a Certificate
- Query Parameters:
name (string) – Certificate Name
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
- POST /lidar-hub/api/v1/cloud_connectivity
Add/Update a Cloud Connectivity Profile
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
- PUT /lidar-hub/api/v1/cloud_connectivity
Set The Active Cloud Connectivity Profile
- Query Parameters:
profile (string) – Cloud Connectivity Profile.
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
- GET /lidar-hub/api/v1/streaming_connectivity
Get Streaming Connectivity Profiles
- Status Codes:
200 OK – OK
- POST /lidar-hub/api/v1/streaming_connectivity
Add/Update a Streaming Connectivity Profile
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
- PUT /lidar-hub/api/v1/streaming_connectivity
Set The Active Streaming Connectivity Profile
- Query Parameters:
profile (string) – Streaming Connectivity Profile.
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
Sensor Management
- GET /lidar-hub/api/v1/background_cloud
Retrieves the background point cloud for all sensors
- Query Parameters:
downsample_factor (number) – How much to downsample the background cloud (1 = no downsampling)
- Status Codes:
200 OK – OK
400 Bad Request – Bad Request
- GET /lidar-hub/api/v1/background_cloud/{sensor_id}
Retrieves the background point cloud for a single sensor
- Parameters:
sensor_id (string) – Lidar Sensor ID (serial number)
- Query Parameters:
downsample_factor (number) – How much to downsample the background cloud (1 = no downsampling)
- Status Codes:
200 OK – OK
400 Bad Request – Bad Request
Event Zones
- GET /lidar-hub/api/v1/event_zones/active
Query Active Occupancy by ID, Classification and Dwell
- Query Parameters:
ids (string) – Comma-delimited string of event zone IDs (default = 0: ALL)
classifications (string) – Comma-delimited string of Classifications (default = ALL)
min_dwell_secs (number) – Minimum dwell in seconds (default = 0.0)
- Status Codes:
200 OK – OK
- GET /lidar-hub/api/v1/event_zones/alerts
Get Active Alerts for All Event Zones
- Status Codes:
200 OK – OK
Execution
- DELETE /lidar-hub/api/v1/event_recording/{name}
Deletes an Event Recording from disk.
- Parameters:
name (string) – Event Recording Name
- Status Codes:
201 Created – OK
404 Not Found – Not Found
- GET /lidar-hub/api/v1/event_recording/{name}
Gets an Event Recording from disk.
- Parameters:
name (string) – Event Recording Name
- Status Codes:
200 OK – OK
404 Not Found – Not Found
- PUT /lidar-hub/api/v1/ota/force_software_check
Force immediate check for a pending software OTA request
- Status Codes:
201 Created – OK
- GET /lidar-hub/api/v1/pcap_recording/buffer_active
Get State of PCAP Ring Buffer
- Status Codes:
200 OK – OK
500 Internal Server Error – Internal Server Error
- POST /lidar-hub/api/v1/pcap_recording/start
Starts a PCAP Recording.
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
405 Method Not Allowed – Method not allowed
- POST /lidar-hub/api/v1/pcap_recording/start_buffer
Starts the PCAP Ring Buffer.
- Query Parameters:
buffer_length_s (number) – Size of PCAP ring buffer in seconds. If not specified (default is 0), the ring buffer will be set to the size specified in the system settings.
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
- GET /lidar-hub/api/v1/pcap_recording/stop
Stops an active PCAP Recording.
- Query Parameters:
id (string) – User Recording ID
stop_trail_seconds (number) – Additional time in seconds to include in the recording following the stop request.
- Status Codes:
200 OK – OK
400 Bad Request – Bad Request
404 Not Found – Not Found
- PUT /lidar-hub/api/v1/pcap_recording/stop_buffer
Stops the PCAP Ring Buffer.
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
- PUT /lidar-hub/api/v1/reset
Restart the Lidar Hub
- Status Codes:
201 Created – OK
- POST /lidar-hub/api/v1/user_recording/start
Starts a User Recording.
- Status Codes:
201 Created – OK
400 Bad Request – Bad Request
405 Method Not Allowed – Method not allowed
- GET /lidar-hub/api/v1/user_recording/stop
Stops an active User Recording.
- Query Parameters:
id (string) – User Recording ID
stop_trail_seconds (number) – Additional time in seconds to include in the recording following the stop request.
- Status Codes:
200 OK – OK
400 Bad Request – Bad Request
404 Not Found – Not Found