Visualizations in 3D
The Ouster Python SDK provides two visualization utilities for user convenience. These are introduced briefly below.
Visualization with Ouster’s SDK CLI ouster-cli
Ouster’s OpenGL-based visualizer allows for easy visualization from pcaps and sensors on all platforms the Ouster SDK supports.
The default Ouster SDK CLI ouster-cli source <sensor | pcap | osf> viz visualizer view includes
two 2D range images atop which can be cycled through the available fields, and a 3D point cloud on
the bottom. For dual returns sensors, both returns are displayed by default.
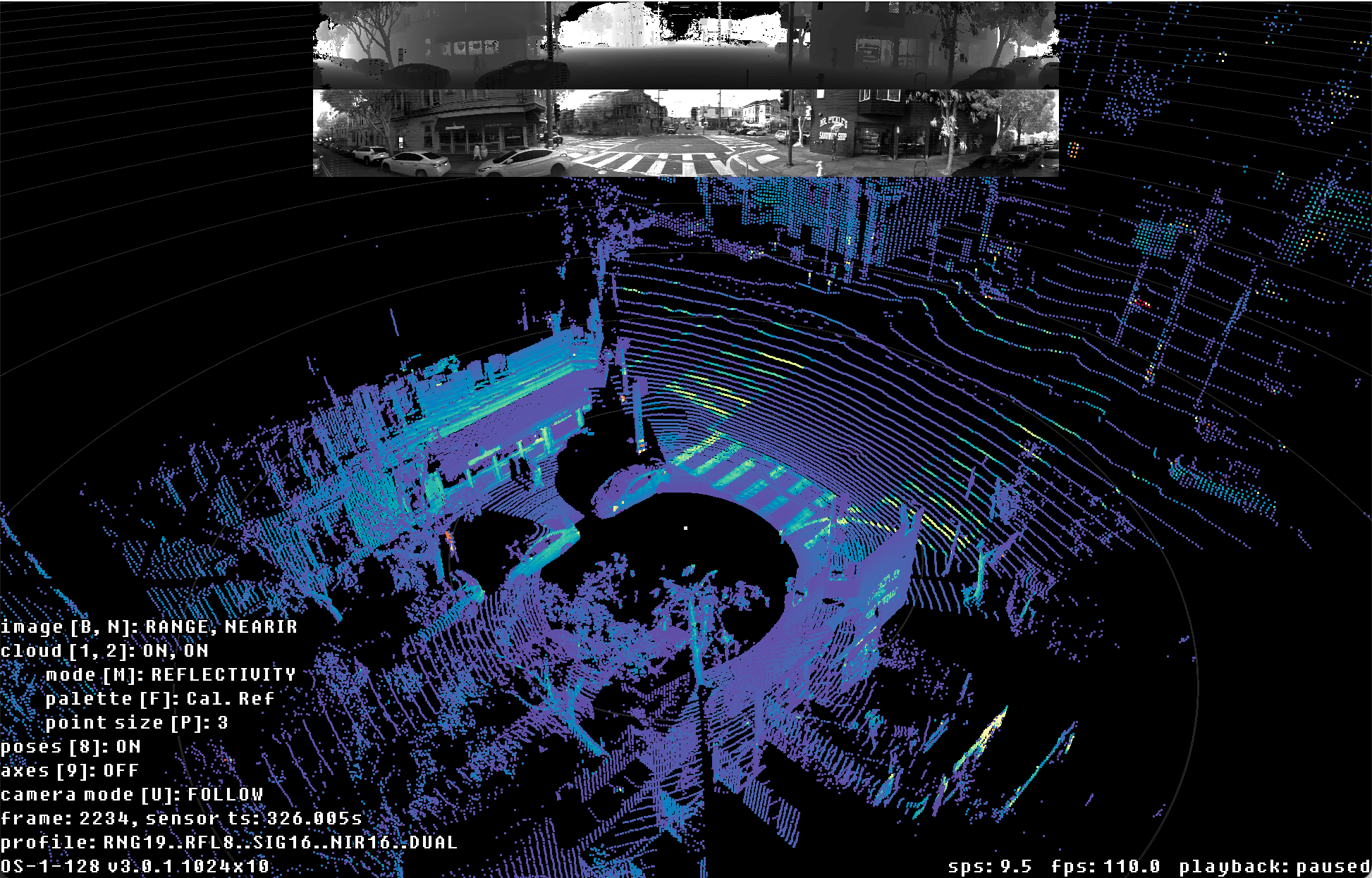
Ouster SDK CLI ouster-cli source <sensor | pcap | osf> viz visualization of OS1 128 Rev 7 sample data
The visualizer can be controlled with mouse and keyboard:
Keyboard Controls
- Camera*
Key
What it does
shiftCamera Translation with mouse drag
wCamera pitch down
sCamera pitch up
aCamera yaw right
dCamera yaw left
qCamera roll left
eCamera roll right
shift+rReset camera
ctrl+rSet camera to the birds-eye view
shift+1Top down view
shift+2Front facing view
shift+3Left facing view
uToggle camera mode FOLLOW/FIXED
= / -Dolly in/out
0Toggle orthographic camera
- Playback
Key
What it does
spaceToggle pause
. / ,Step one frame forward/back
ctrl + . / ,Step 10 frames forward/back
> / <Increase/decrease playback rate (during replay)
- 2D View
Key
What it does
b / BCycle top 2D image
n / NCycle bottom 2D image
i / shift+iIncrease/decrease size of displayed 2D images
- 3D View
Key
What it does
p / PIncrease/decrease point size
m / MCycle point cloud coloring mode
f / FCycle point cloud color palette
ctrl + [N]Enable/disable the Nth sensor cloud where N is 1 to 9
1Toggle first return point cloud visibility
2Toggle second return point cloud visibility
6Toggle scans accumulation view mode (ACCUM)
7Toggle overall map view mode (MAP)
8Toggle poses/trajectory view mode (TRACK)
2Toggle second return point cloud visibility
9Show axes
' / shift+'Increase/decrease spacing in range markers
ctrl + 'Increase thickness of range markers
cCycle current highlight mode
j / JIncrease/decrease point size of accumulated clouds or map
k / KCycle point cloud coloring mode of accumulated clouds or map
g / GCycle point cloud color palette of accumulated clouds or map
- Other
Key
What it does
oToggle on-screen display
?Print keys to standard out
shift+zSave a screenshot of the current view
shift+xToggle a continuous saving of screenshots
v / shift+vCycle screenshot resolution factor
escExit
To run the visualizer with a sensor:
$ ouster-cli source $SENSOR_HOSTNAME viz
This will auto-configure the udp destination of the sensor while leaving the lidar port as previously set on the sensor.
To run the visualizer with a pcap:
$ ouster-cli source $SAMPLE_DATA_PCAP_PATH [--meta $SAMPLE_DATA_JSON_PATH] viz
Visualization with Ouster’s viz.PointViz
Please refer to PointViz Tutorial & API Usage for details on extending and customizing
viz.PointViz.
Visualization with Open3d
The Open3d library contains Python bindings for a variety of tools for working with point cloud
data. Loading data into Open3d is just a matter of reshaping the numpy representation of a point
cloud, as demonstrated in the examples.pcap.pcap_3d_one_scan() example:
1# compute point cloud using core.SensorInfo and core.LidarScan
2xyz = core.XYZLut(metadata)(scan)
Once you have the xyz numpy array, you can create an Open3d point cloud and visualize it as follows:
1# create point cloud and coordinate axes geometries
2cloud = o3d.geometry.PointCloud(
3 o3d.utility.Vector3dVector(xyz.reshape((-1, 3)))) # type: ignore
4axes = o3d.geometry.TriangleMesh.create_coordinate_frame(
5 1.0) # type: ignore
6
7# initialize visualizer and rendering options
8vis = o3d.visualization.Visualizer() # type: ignore
9
10vis.create_window()
11vis.add_geometry(cloud)
12vis.add_geometry(axes)
13ropt = vis.get_render_option()
14ropt.point_size = 1.0
15ropt.background_color = np.asarray([0, 0, 0])
16
17# initialize camera settings
18ctr = vis.get_view_control()
19ctr.set_zoom(0.1)
20ctr.set_lookat([0, 0, 0])
21ctr.set_up([1, 0, 0])
22
23# run visualizer main loop
24print("Press Q or Escape to exit")
25vis.run()
26vis.destroy_window()
27source.close()
The examples.open3d module contains a more fully-featured visualizer built using the Open3d
library, which can be used to replay pcap files or visualize a running sensor. The bulk of the
visualizer is implemented in the examples.open3d.viewer_3d() function.
Note
You’ll have to install the Open3d package from PyPI to run this example.
As an example, you can view frame 84 from the sample data by running the following command:
$ python3 -m ouster.sdk.examples.open3d_example \
--pcap $SAMPLE_DATA_PCAP_PATH --start 84 --pause
PS > py -3 -m ouster.sdk.examples.open3d_example ^
--pcap $SAMPLE_DATA_PCAP_PATH --start 84 --pause
You may also want to try the --sensor option to display the output of a running sensor. Use the
-h flag to see a full list of command line options and flags.
Running the example above should open a window displaying a scene from a city intersection, reproduced below:
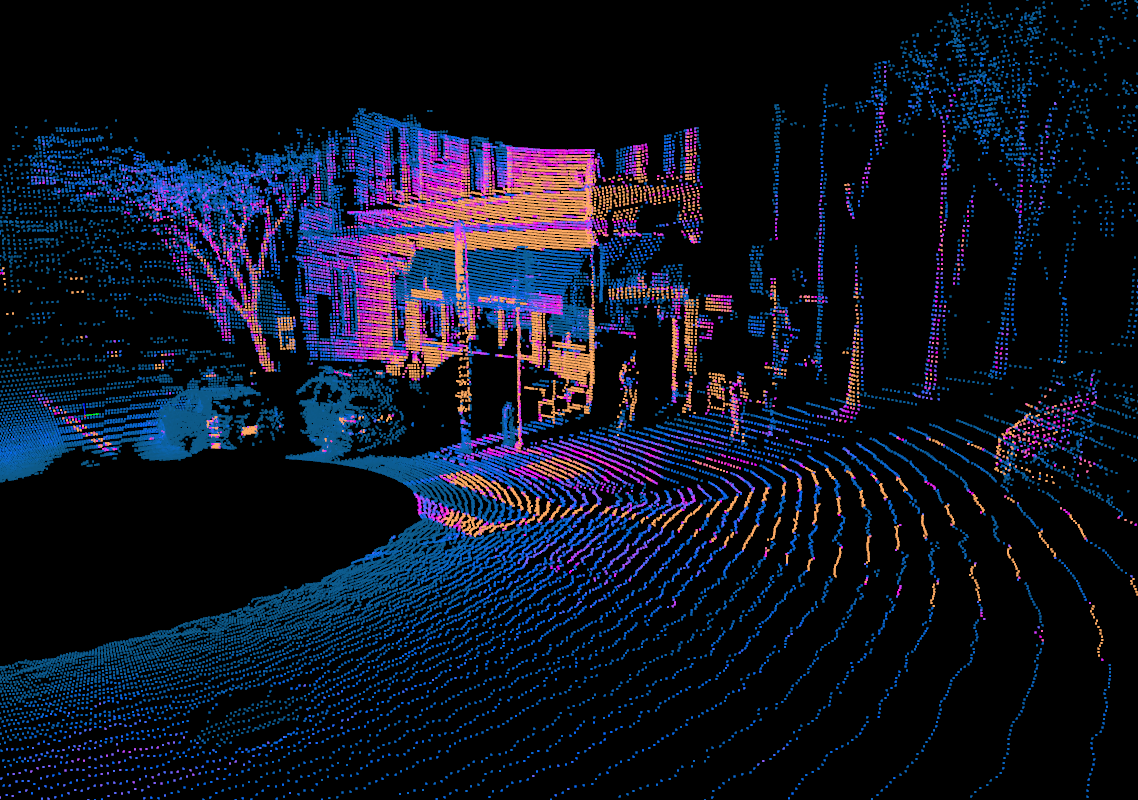
Open3D visualization of OS1 sample data (frame 84). Points colored by SIGNAL field.
You should be able to click and drag the mouse to look around. You can zoom in and out using the mouse wheel, and hold control or shift while dragging to pan and roll, respectively.
Hitting the spacebar will start playing back the rest of the pcap in real time. Note that reasonable performance for real-time playback requires relatively fast hardware, since Open3d runs all rendering and processing in a single thread.
All of the visualizer controls are listed in the table below:
Key |
What it does |
|---|---|
Mouse wheel |
Zoom in and out |
Left click + drag |
Tilt and rotate the camera |
Ctrl + left click + drag |
Pan the camera laterally |
Shift + left click + drag |
Roll the camera |
“+” / “-” |
Increase or decrease point sizes |
Spacebar |
Pause or resume playback |
“M” |
Cycle through channel fields used for visualization |
Right arrow key |
When reading a pcap, jump 10 frames forward |
Visualization with Matplotlib
You should have defined source using either a pcap file or UDP data streaming directly from a
sensor, please refer to Developer’s Quick Start with the Ouster Python SDK for introduction.
Note
Below pictures were rendered using OS2 128 Rev 05 Bridge sample data.
Let’s read from source until we get to the 50th frame of data:
from contextlib import closing
from more_itertools import nth
import ouster.sdk.core as core
with closing(core.Scans(source)) as scans:
scan = nth(scans, 50)
Note
If you’re using a sensor and it takes a few seconds, don’t be alarmed! It has to get to the 50th frame of data, which would be 5.0 seconds for a sensor running in 1024x10 mode.
We can extract the range measurements from the frame of data stored in the core.LidarScan
datatype and plot a range image where each column corresponds to a single azimuth angle:
range_field = scan[0].field(core.ChanField.RANGE)
range_img = core.destagger(sensor_info, range_field)
We can plot the results using standard Python tools that work with numpy data types. Here, we extract a column segment of the range data and display the result:
import matplotlib.pyplot as plt
plt.imshow(range_img[:, 640:1024], resample=False)
plt.axis('off')
plt.show()
Note
If running plt.show gives you an error about your Matplotlib backend, you will need a GUI
backend such as TkAgg or Qt5Agg in order to visualize your data with matplotlib.
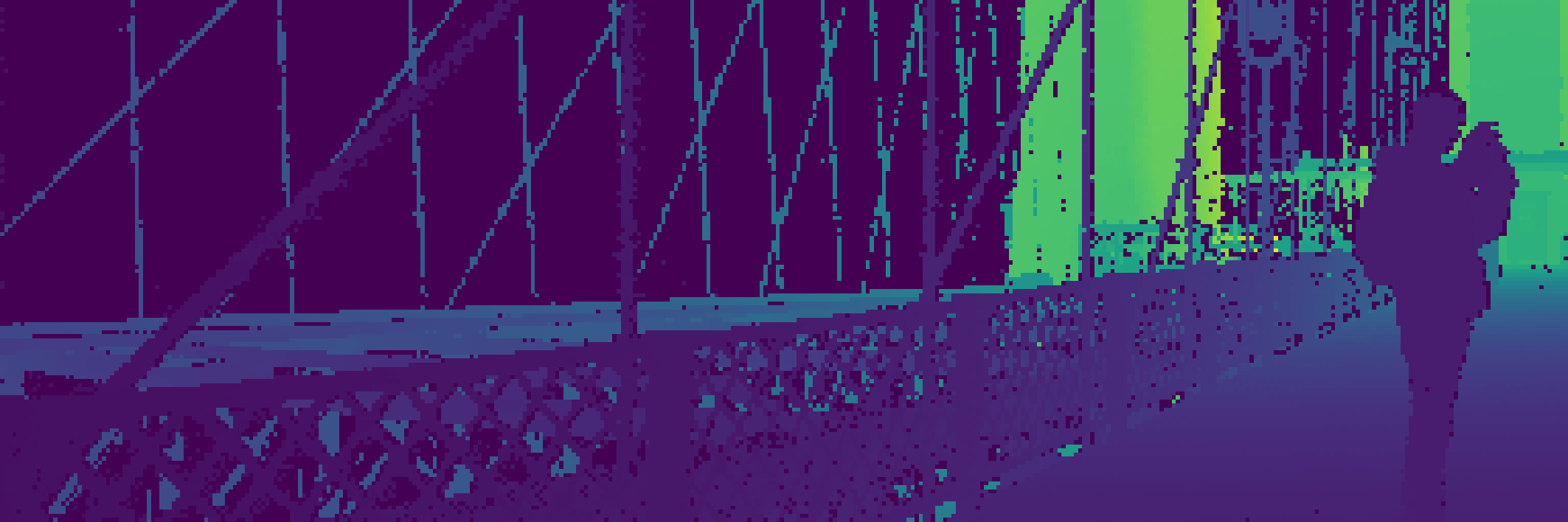
Range image of OS2 bridge data. Data taken at Brooklyn Bridge, NYC.
In addition to viewing the data in 2D, we can also plot the results in 3D by projecting the range measurements into Cartesian coordinates. To do this, we first create a lookup table, then use it to produce X, Y, Z coordinates from our scan data with shape (H x W x 3):
xyzlut = core.XYZLut(sensor_info)
xyz = xyzlut(scan[0])
Now we rearrange the resulting numpy array into a shape that’s suitable for plotting:
import numpy as np
[x, y, z] = [c.flatten() for c in np.dsplit(xyz, 3)]
ax = plt.axes(projection='3d')
r = 10
ax.set_xlim3d([-r, r])
ax.set_ylim3d([-r, r])
ax.set_zlim3d([-r/2, r/2])
plt.axis('off')
z_col = np.minimum(np.absolute(z), 5)
ax.scatter(x, y, z, c=z_col, s=0.2)
plt.show()
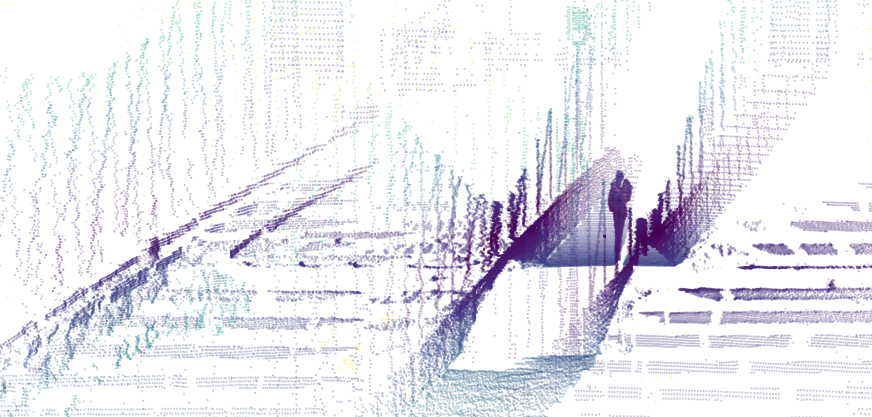
Point cloud from OS2 bridge data with colormap on z. Data taken at Brooklyn Bridge, NYC.
You should be able to rotate the resulting scene to view it from different angles.
To learn more about manipulating lidar data, see:
Set coloring mode or image mode using LidarScanViz API
From 0.15.0, you can now set an image mode or coloring mode using visualization api.
from ouster.sdk import viz, open_source
import sys
src = open_source(sys.argv[1])
sviz = None
def iter():
global sviz
for scan in src:
sviz._scan_viz.update(scan)
break
sviz._scan_viz.select_cloud_mode("RANGE")
sviz._scan_viz.select_img_mode(0, "RANGE")
for scan in src:
yield scan
sviz = viz.SimpleViz(src.sensor_info)
sviz.run(iter())