Running the Ouster visualizer
After installing the ouster-sdk package, you can run:
$ ouster-cli source <sensor hostname> viz
where <sensor hostname> is the hostname (os-99xxxxxxxxxx) or IP of the sensor.
Alternately, to replay the existing data from pcap and json files call the visualizer as:
$ ouster-cli source [--meta <meta_path>] <pcap_path> viz
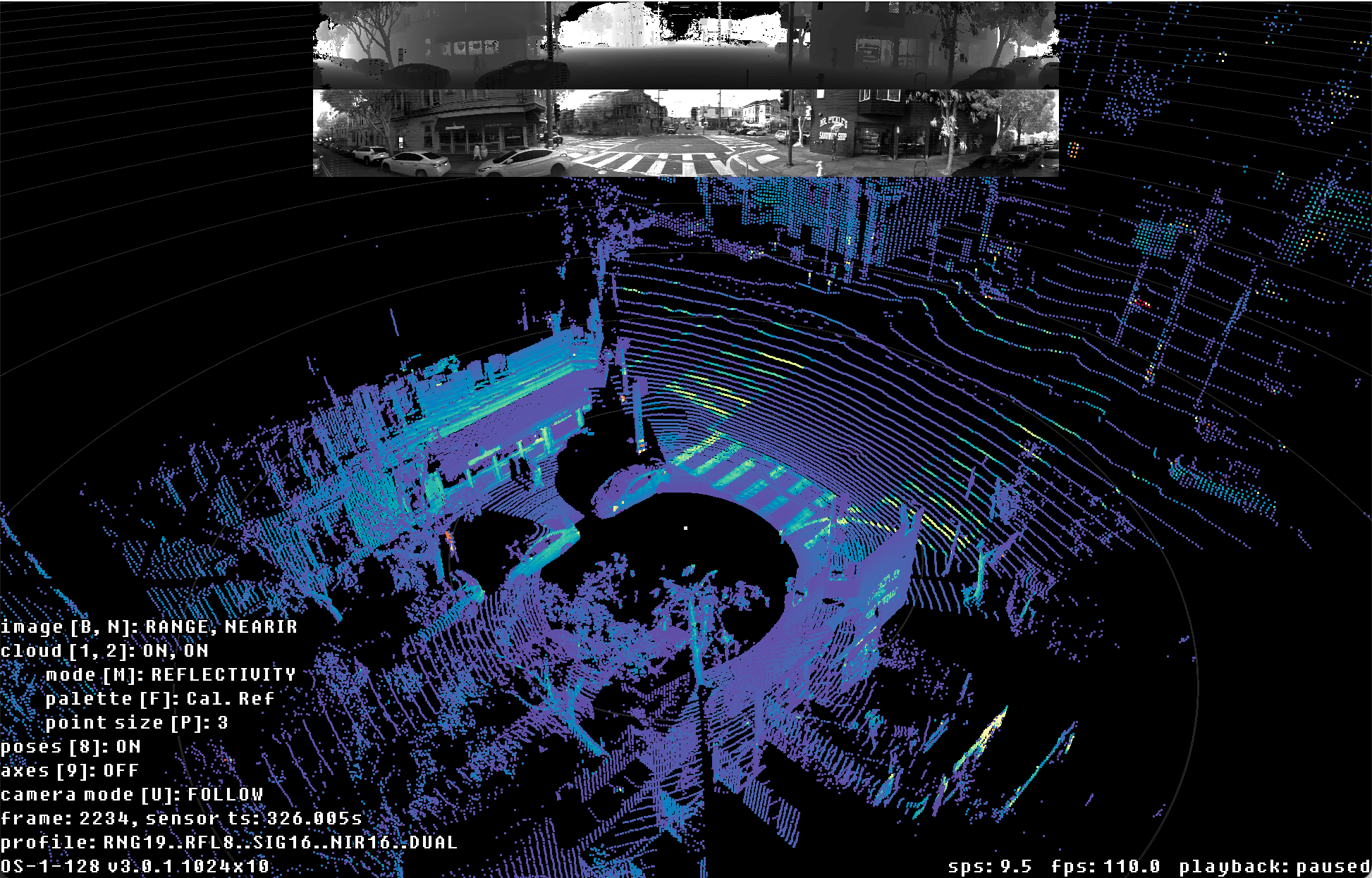
Ouster SDK CLI ouster-cli source <sensor | pcap | osf> viz visualization of OS1 128 sample data
The Ouster SDK CLI visualizer does not include a GUI, but can be controlled with the mouse and keyboard:
Click and drag rotates the view
Middle click and drag moves the view
Scroll adjusts how far away the camera is from the vehicle
Keyboard Controls
- Camera*
Key
What it does
shiftCamera Translation with mouse drag
wCamera pitch down
sCamera pitch up
aCamera yaw right
dCamera yaw left
qCamera roll left
eCamera roll right
shift+rReset camera
ctrl+rSet camera to the birds-eye view
shift+1Top down view
shift+2Front facing view
shift+3Left facing view
uToggle camera mode FOLLOW/FIXED
= / -Dolly in/out
0Toggle orthographic camera
- Playback
Key
What it does
spaceToggle pause
. / ,Step one frame forward/back
ctrl + . / ,Step 10 frames forward/back
> / <Increase/decrease playback rate (during replay)
- 2D View
Key
What it does
b / BCycle top 2D image
n / NCycle bottom 2D image
i / shift+iIncrease/decrease size of displayed 2D images
- 3D View
Key
What it does
p / PIncrease/decrease point size
m / MCycle point cloud coloring mode
f / FCycle point cloud color palette
ctrl + [N]Enable/disable the Nth sensor cloud where N is 1 to 9
1Toggle first return point cloud visibility
2Toggle second return point cloud visibility
6Toggle scans accumulation view mode (ACCUM)
7Toggle overall map view mode (MAP)
8Toggle poses/trajectory view mode (TRACK)
2Toggle second return point cloud visibility
9Show axes
' / shift+'Increase/decrease spacing in range markers
ctrl + 'Increase thickness of range markers
cCycle current highlight mode
j / JIncrease/decrease point size of accumulated clouds or map
k / KCycle point cloud coloring mode of accumulated clouds or map
g / GCycle point cloud color palette of accumulated clouds or map
- Other
Key
What it does
oToggle on-screen display
?Print keys to standard out
shift+zSave a screenshot of the current view
shift+xToggle a continuous saving of screenshots
v / shift+vCycle screenshot resolution factor
escExit
The visualizer also includes an option to control the orientation of the point cloud in space when
loaded. If you possess, say, an OS-DOME mounted an upside down, you can start the visualizer with
the option --extrinsics:
$ ouster-cli source --extrinsics "-1 0 0 0 0 1 0 0 0 0 -1 0 0 0 0 1" 10.0.0.13 viz
The input is a row-major homogeneous matrix.
For other options, run ouster-cli source <sensor | pcap | osf> viz -h
Note
All basic primitives that you see as part of ouster-cli visualizer are exposed through
viz.PointViz bindings. Please see PointViz Tutorial & API Usage for how to use it
programmatically in Python.
Advanced usage with sensor
The Ouster visualizer automatically configures connected sensors to send data to the appropriate UDP
destination address. If your sensor is already configured appropriately, you may find it useful to
use the argument --no-auto-udp-dest to save time by skipping the round trip to reconfigure the
sensor.