Sensor Data
Coordinate Frames and XYZ Calculation
Ouster defines two coordinate frames:
The Lidar Coordinate Frame follows the Right Hand Rule convention and is a point cloud-centric frame of reference that is the simplest frame in which to calculate and manipulate point clouds. The X-axis points backwards towards the external connector, which is an unintuitive orientation that was deliberately chosen to meet the following criteria:
Data frames split at the back of the sensor i.e. the external connector
Data frames start with the azimuth angle equal to 0°
All point cloud features including setting an azimuth window and phase locking are defined in the Lidar Coordinate Frame.
The Sensor Coordinate Frame follows the Right Hand Rule convention and is a mechanical housing-centric frame of reference that follows robotics convention with X-axis pointing forward. Ouster-provided drivers and visualizers represent data in the Sensor Coordinate Frame.
Note
All Ouster coordinate frames follow the Right Hand Rule, allowing for standard 3D transformation matrix math to convert between them. For multi-sensor systems that require calibration, this Linear Algebra-based approach can be convenient. However, customers with single-sensor systems may find it more intuitive to stay in the Lidar Coordinate Frame and take arithmetic shortcuts.
Lidar Coordinate Frame
The Lidar Coordinate Frame is defined at the intersection of the lidar axis of rotation and the lidar optical midplane (a plane parallel to Sensor Coordinate Frame XY plane and coincident with the 0° elevation beam angle of the sensor).
- The Lidar Coordinate Frame axes are arranged with:
positive X-axis pointed at encoder angle 0° and the external connector
positive Y-axis pointed towards encoder angle 90°
positive Z-axis pointed towards the top of the sensor
The Lidar Coordinate Frame is marked in both diagrams below with XL, YL, and ZL.

Top-down view of Lidar Coordinate Frame
Lidar Range to XYZ
Given the following information, range data may be transformed into 3D cartesian XYZ coordinates in the Lidar Coordinate Frame:
- From a measurement block from the UDP packet:
- From the GET /api/v1/sensor/metadata/beam_intrinsics HTTP Command:
beam_to_lidar_transform[3] valuebeam_altitude_anglesarraybeam_azimuth_anglesarray
The corresponding 3D point can be computed by
![r &= \texttt{range\_mm} \\
|\vec{n}| &= \sqrt{(beam\_to\_lidar[0,3])^2 + (beam\_to\_lidar[2,3])^2} \\
r &= |\vec{r'}| + |\vec{n}| \\
\theta_{encoder} &= 2\pi \cdot \left ( 1 - \frac{\texttt{measurement\ ID}}{\texttt{scan\_width}}\right ) \\
\theta_{azimuth} &= -2\pi \frac{\texttt{beam\_azimuth\_angles[i]}}{360} \\
\phi &= 2\pi \frac{\texttt{beam\_altitude\_angles[i]}}{360} \\
\\
x &= (r-|\vec{n}|) \cos\left(\theta_{encoder} + \theta_{azimuth}\right) \cos(\phi) + (beam\_to\_lidar[0,3]) \cos\left(\theta_{encoder}\right) \\
y &= (r-|\vec{n}|) \sin\left(\theta_{encoder} + \theta_{azimuth}\right) \cos(\phi) + (beam\_to\_lidar[0,3]) \sin\left(\theta_{encoder}\right) \\
z &= (r-|\vec{n}|) \sin(\phi) + (beam\_to\_lidar[2,3]) \\](../../../_images/math/0857297bc313f2c64a8250c38e96e5ecc98cea6c.png)

Side view of Lidar Coordinate Frame
Note
Firmware version 2.x is not supported for OSDome. Minimum requirement is Firmware version 3.x and later.
Sensor Coordinate Frame
The Sensor Coordinate Frame is defined at the center of the sensor housing on the bottom, with the X-axis pointed forward, Y-axis pointed to the left and Z-axis pointed towards the top of the sensor. The external connector is located in the negative x direction. The Sensor Coordinate Frame is marked in the diagram below with XS, YS, ZS.

Top-down view of Sensor Coordinate Frame

Side view of Sensor Coordinate Frame
Combining Lidar and Sensor Coordinate Frame
The Lidar Coordinate Frame’s positive X-axis (0 encoder value) is opposite the Sensor Coordinate Frame’s positive X-axis to center lidar data about the Sensor Coordinate Frame’s positive X-axis. A single measurement frame starts at the Lidar Coordinate Frame’s 0° position and ends at the 360° position. This is convenient when viewing a “range image” of the Ouster Sensor measurements, allowing the “range image” to be centered in the Sensor Coordinate Frame’s positive X-axis, which is generally forward facing in most robotic systems.
The Ouster Sensor scans in the clockwise direction when viewed from the top, which is a negative rotational velocity about the Z-axis. Thus, as encoder ticks increase from 0 to 90,111, the actual angle about the Z-axis in the Lidar Coordinate Frame will decrease.
Lidar Intrinsic Beam Angles
The intrinsic beam angles for each beam may be queried with a HTTP command GET /api/v1/sensor/metadata/beam_intrinsics to provide an azimuth and elevation adjustment offset to each beam. The azimuth adjustment is referenced off of the current encoder angle and the elevation adjustment is referenced from the XY plane in the Sensor and Lidar Coordinate Frames.
Lidar Range Data To Sensor XYZ Coordinate Frame
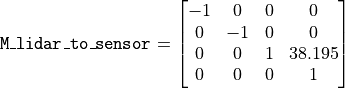
For applications that require calibration against a precision mount or use the IMU data (Inertial Measurement Unit) in combination with the lidar data, the XYZ points should be adjusted to the Sensor Coordinate Frame. This requires a Z translation and a rotation of the X,Y,Z points about the Z-axis. The Z translation is the height of the lidar aperture stop above the sensor origin, which varies depending on the sensor you have, and the data must be rotated 180° around the Z-axis. This information can be queried over TCP in the form of a homogeneous transformation matrix in row-major ordering.
Example JSON formatted query using the HTTP command GET /api/v1/sensor/metadata/lidar_intrinsics:
{
"lidar_to_sensor_transform": [-1, 0, 0, 0, 0, -1, 0, 0, 0, 0, 1, 38.195, 0, 0, 0, 1]
}
Which corresponds to the following matrix
IMU Data To Sensor XYZ Coordinate Frame
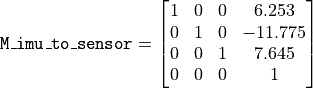
The IMU is slightly offset in the Sensor Coordinate Frame for practical reasons. The IMU origin in the Sensor Coordinate Frame can be queried over HTTP command in the form of an homogeneous transformation matrix in row-major ordering.
Example 1- Expected response for HTTP command GET /api/v1/sensor/metadata/imu_intrinsics when using Gen1 OS1 (all revisions), Gen2 OS01 (all revisions) and Gen2 OS2 (top-level revisions A, B, C)
{
"imu_to_sensor_transform": [1, 0, 0, 6.253, 0, 1, 0, -11.775, 0, 0, 1, 7.645, 0, 0, 0, 1]
}
Which corresponds to the following matrix
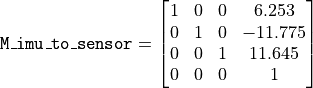
Example 2- Expected response for HTTP command GET /api/v1/sensor/metadata/imu_intrinsics when using Gen2 OS2 (top-level revisions D and higher)
{
"imu_to_sensor_transform": [1, 0, 0, 6.253, 0, 1, 0, -11.775, 0, 0, 1, 11.645, 0, 0, 0, 1]
}
Which corresponds to the following matrix
Lidar Data Packet Format
With firmware version 2.3 and above, users will have the option to switch between different lidar data packet formats as shown below.
By default, the data packet format will be set to Single Return Profile for Firmware v2.5.0 and later.
Note
In order to enable dual returns the user needs to have both a Rev 06 sensor or later and an upgrade to firmware version 2.2 or later. If using a Rev7 Sensor and later then FW 3.0 or later is a minimum requirement.
Warning
Please note LEGACY data packet format will be deprecated in Q3,2023.
Configurable Data Packet Format
When setting the udp_profile_lidar to a value other than LEGACY, a new packet format will be automatically activated. This packet format, called the configurable data packet format, allows the users to choose between different options for the channel data profile depending on their usage, while maintaining a uniform packet structure across different profiles. It is described in detail below.
Lidar Data Format
When the config parameter udp_profile_lidar is set to a parameter other than LEGACY, we will be in the Configurable data packet format. Each data packet consists of Packet Header, Measurement Header, Channel Data Blocks and Packet Footer. The packet rate is dependent on the lidar mode. Words are 32 bits in length and little endian. By default, lidar UDP data is forwarded to Port 7502. Please refer to the HTTP API portion of this manual for more information on setting this parameter. Alternately, this mode can also be configured via the Web Interface.
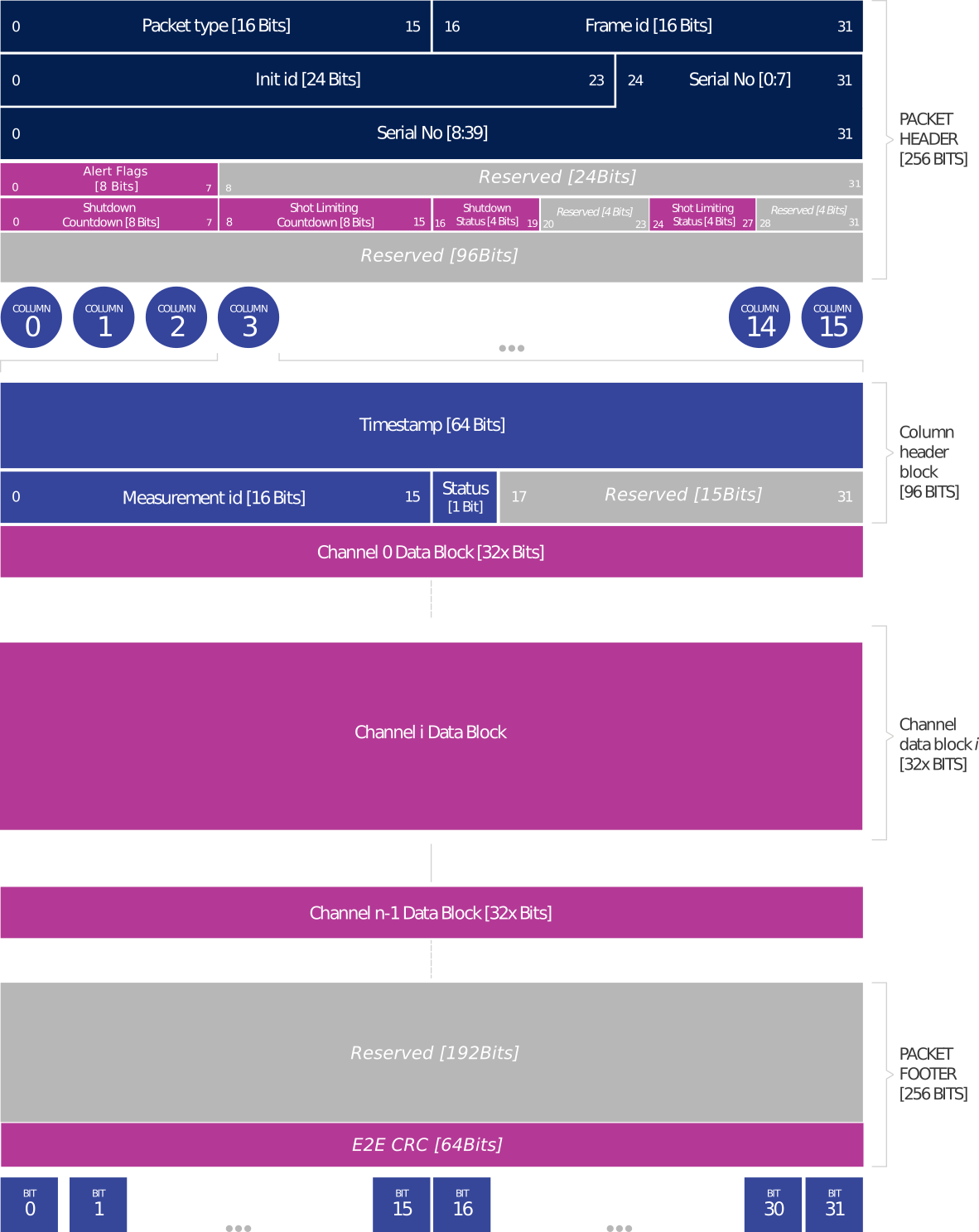
Packet layout
Packet Header [256 bits]
Packet type [16 bit unsigned int] - Identifies lidar data vs. other packets in stream. Packet Type is 0x1 for Lidar packets.
Frame ID [16 bit unsigned int] - Index of the lidar scan, increments every time the sensor completes a rotation, crossing the zero azimuth angle.
Init ID [24 bit unsigned int] - Initialization ID. Updates on every reinit, which may be triggered by the user or an error, and every reboot. This value may also be obtained by running the HTTP command GET /api/v1/sensor/metadata/sensor_info.
Serial No [40 bit unsigned int] - Serial number of the sensor. This value is unique to each sensor and can be found on a sticker affixed to the top of the sensor. In addition, this information is also available on the Sensor Web UI and by reading the field
prod_snfromget_sensor_info.Shot limiting status [4 bit unsigned int] - Indicates the shot limiting status of the sensor. Different codes indicates whether the sensor is in Normal Operation or in Shot Limiting. Please refer to Shot Limiting section for more details.
Shutdown Status [4 bit unsigned int] - Indicates whether thermal shutdown is imminent. Please refer to Shot Limiting section for more details.
Shot limiting Countdown [8 bit unsigned int] - Countdown from 30s to indicate when shot limiting is imminent. Please refer to Shot Limiting section for more details.
Shutdown Countdown [8 bit unsigned int] - Countdown from 30s to indicate that thermal shutdown is imminent. Please refer to Shot Limiting section for more details.
- Alert Flags [8 bit unsigned int]:
bit [0-5]: alert_cursors (Increments sequentially every time a new alert is active or an alert is cleared. At this time users can query GET /api/v1/sensor/alerts to understand which alert was activated or cleared).
bit [6]: cursor_overflow (true if cursor overflows, cleared when get_alerts is read. cursor_overflow turns on whenever alert_cursors goes from 63->0, and stays on until the next time get_alerts is called).
bit [7]: alerts_active (true if ANY alerts are active).
Column Header Block [96 bits]
Timestamp [64 bit unsigned int] - Timestamp of the measurement in nanoseconds.
Measurement ID [16 bit unsigned int] - Sequentially incrementing measurement counting up from 0 to 511, or 0 to 1023, or 0 to 2047 depending on lidar_mode.
Status [1 bit unsigned int] - Indicates validity of the measurements. Status is 0x01 for valid measurements. Status is 0x00 for dropped or disabled columns.
Channel Data Blocks [Varies based on channel data profile]
The size and the structure of the channel data block varies based on the configurable data packet format chosen by the user. More information on each of these options are described below in the following sections.
Packet Footer [256 bits]
Reserved [192 bits]
E2E CRC [64 bits] - This covers the cyclic redundancy check (CRC) on the entire data packet. For more details refer below:
End2End CRC64 calculation parameters
The CRC64 is calculated on the received UDP lidar packet payload bytes, in the same received bit order, without the encoded CRC64 value [I.E. excluding the last 64 bits of the received lidar packet], and by using the following CRC algorithm calculation parameters:
CRC Result Width |
64 bits |
Polynomial |
0x42f0e1eba9ea3693 |
Initial Value |
0xffffffffffffffff |
Input data reflected |
Yes |
Result data reflected |
Yes |
XOR Value |
0xffffffffffffffff |
Since the value of the CRC64 in the received lidar packet is encoded as a Little-Endian hex value; you will have to reverse the CRC64 bytes (last 8 bytes of the lidar packet) before comparing them with the hex value of the calculated CRC64 that is based on the received lidar packet bytes.
Configurable Data Packet Configuration
Channel Data Profiles
This section describes the different channel data profile options that are available to the users as part of the configurable data packet format. Each of these data profiles can be selected by setting the configuration parameter udp_profile_lidar to one of the following options:
RNG19_RFL8_SIG16_NIR16 (Single Return Profile)
RNG15_RFL8_NIR8 (Low Data Rate Profile)
RNG19_RFL8_SIG16_NIR16_DUAL (Dual Return Profile)
More details on how to set the configuration parameters are described in the HTTP API Reference Guide portion of this Firmware User Manual.
Note
Calibrated reflectivity has certain hardware requirements. Please refer to the Calibrated Reflectivity section for more details.
Description |
|||
Profiles |
|
|
|
Words per pixel |
3 |
1 |
4 |
Range RET1 |
19 bits |
15 bits |
19 bits |
Reflectivity RET1 |
8 bits |
8 bits |
8 bits |
Range RET2 |
Not Available |
Not Available |
19 bits |
Reflectivity RET2 |
Not Available |
Not Available |
8 bits |
Signal RET1 |
16 bits |
Not Available |
16 bits |
Signal RET2 |
Not Available |
Not Available |
16 bits |
NIR |
16 bits |
8 bits |
16 bits |
Single Return Profile
The data packet format for all sensors by default are set to RNG19_RFL8_SIG16_NIR16 i.e., Single Return Profile. This channel data profile can also be activated from a different setting by changing the configuration parameter udp_profile_lidar to RNG19_RFL8_SIG16_NIR16.
Note
This is only available with firmware version 2.3 or later. If you are using a Rev7 sensor then FW 3.0 or later is the minimum requirement.
set_config_param udp_profile_lidar RNG19_RFL8_SIG16_NIR16
The above command will set the channel data profile in the configurable data packet format to Single Return mode. This channel data profile is identical to the channel data block present in LEGACY format, but makes use of the configurable data packet format. Users looking to take advantage of the configurable data packet format can use this profile in place of LEGACY. The channel data profile for this is described below.
Channel Data Blocks [96 bits each for RNG19_RFL8_SIG16_NIR16 profile]
For RNG19_RFL8_SIG16_NIR16 profile the channel data block consists of 3 words to accommodate data for porting over the LEGACY profile to configurable Data Packet format. Only a single return will be made available to the user.
Range [19 bit unsigned int] - Range in millimeters, discretized to the nearest 1 millimeters with a maximum range of 524m. Note that range value will be set to 0 if out of range or if no detection is made.
Calibrated Reflectivity [8 bit unsigned int] - Sensor Signal Photons measurements are scaled based on measured range and sensor sensitivity at that range, providing an indication of target reflectivity.
Signal Photons [16 bit unsigned int] - Signal intensity photons in the signal return measurement are reported.
Near Infrared Photons [16 bit unsigned int] - NIR photons related to natural environmental illumination are reported.
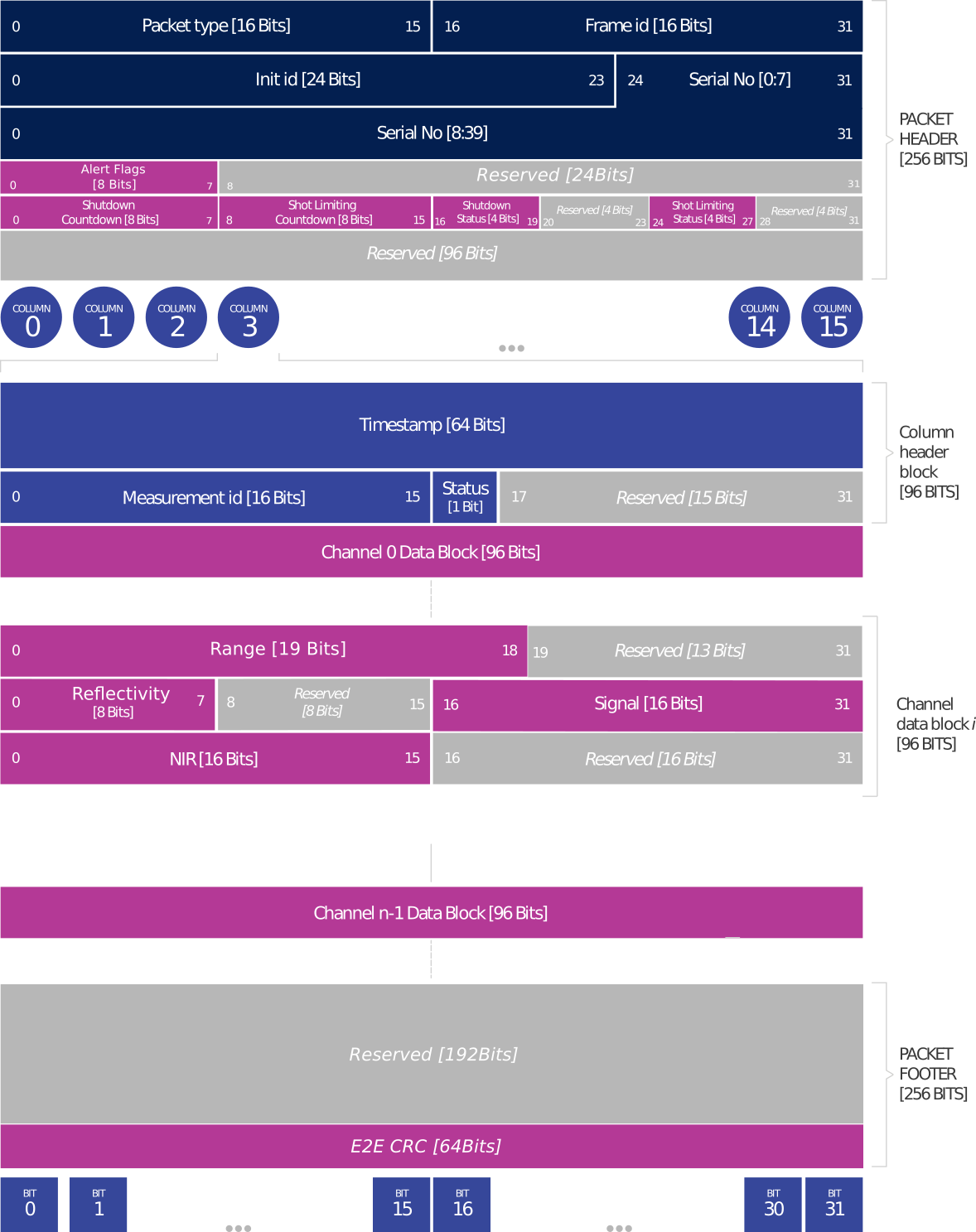
Single Return Configuration
Low Data Rate Profile
This channel data profile can be activated by setting the configuration parameter udp_profile_lidar to RNG15_RFL8_NIR8.
Note
This is only available with firmware version 2.3 or later. If you are using a Rev7 sensor then FW 3.0 or later is the minimum requirement.
set_config_param udp_profile_lidar RNG15_RFL8_NIR8
The above command will set the channel data profile in the configurable data packet format to Low Data Rate configuration.
This channel data profile is especially useful to users who are looking to adopt a channel data profile to fit with limited compute capabilities. The data rate and the data packet size that are achieved as a result of using this profile will be smaller as compared to the other channel data profile options that are available.
The channel data profile for this is described below.
Channel Data Blocks [32 bits each for RNG15_RFL8_NIR8 profile]
For the RNG15_RFL8_NIR8 profile the channel data block consists of only 1 word to accommodate data for optimizing information at a low data rate. Only a single return will be made available to the user.
Range [15 bit unsigned int] - Range scaled down by a factor of 8 mm, for a maximum range of (2^15*8) = 262 m in 15 bits. Note: The range value will be set to 0 if out of range or if no detection is made.
Calibrated Reflectivity [8 bit unsigned int] - Sensor Signal Photons measurements are scaled based on measured range and sensor sensitivity at that range, providing an indication of target reflectivity.
Near Infrared Photons [8 bit unsigned int] - NIR photons related to natural environmental illumination are reported. Measurements are taken similar to LEGACY and other data profiles (Single Data Profile and Dual Return Profile) but it is scaled down by a factor of 16.
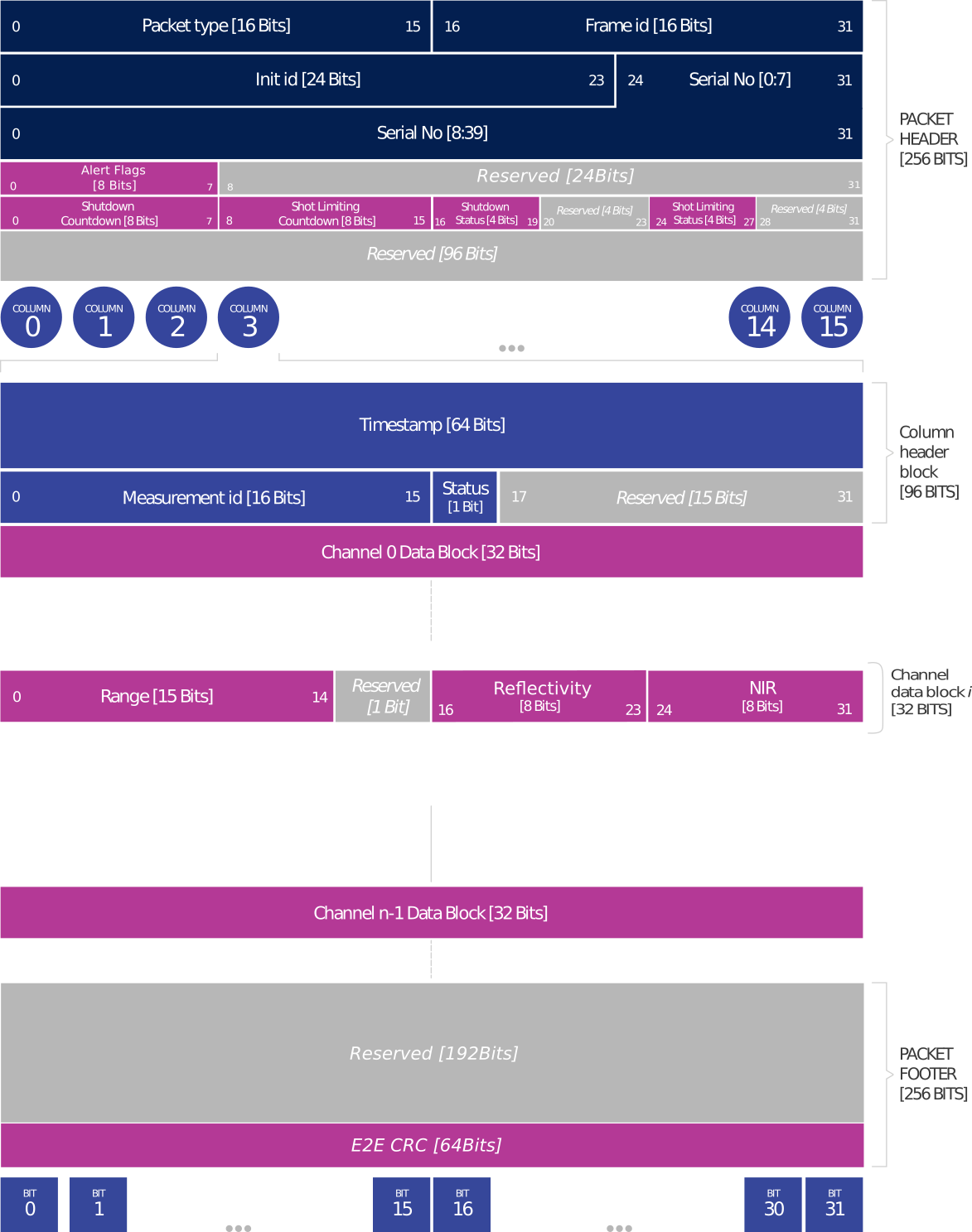
Low Data Rate Configuration
Dual Return Profile
This channel data profile can be activated by setting the configuration parameter udp_profile_lidar to RNG19_RFL8_SIG16_NIR16_DUAL.
Note
Please note in order to enable dual returns the user needs to have both a Rev 06 sensor or later and an upgrade to firmware version 2.2 or later. If using a Rev7 sensor then the minimum firmware version requirement is 3.0.0 or later.
set_config_param udp_profile_lidar RNG19_RFL8_SIG16_NIR16_DUAL
Note
Starting firmware v3.0.0, RNG19_RFL8_SIG16_NIR16_DUAL profile is valid for 1024x20 and 2048x10 lidar mode.
This feature is meant to allow the sensor to provide an output up to 2 returns (Strongest and Second Strongest).
This feature will allow Ouster sensors to operate in scenarios with semi-transparent obscurants, such as rain, fog, or even a chain-link fence. In these scenarios, the strongest and second strongest returns are required to see both the semi-transparent object, as well as whatever may lie behind it.
Channel Data Blocks [128 bits each for RNG19_RFL8_SIG16_NIR16_DUAL profile]
For RNG19_RFL8_SIG16_NIR16_DUAL profile the channel data block consists of 4 words to accommodate data for the multiple returns. A total of up to two returns will be made available to the user.
Range RET1/2 [19 bit unsigned int] - range in millimeters, discretized to the nearest 1 millimeters with a maximum range of 524m. Note that range value will be set to 0 if out of range or if no detection is made.
Calibrated Reflectivity RET1/2 [8 bit unsigned int] - Sensor Signal Photons measurements are scaled based on measured range and sensor sensitivity at that range, providing an indication of target reflectivity.
Signal Photons RET1/2 [16 bit unsigned int] - Signal intensity photons in the signal return measurement are reported.
Near Infrared Photons [16 bit unsigned int] - NIR photons related to natural environmental illumination are reported.
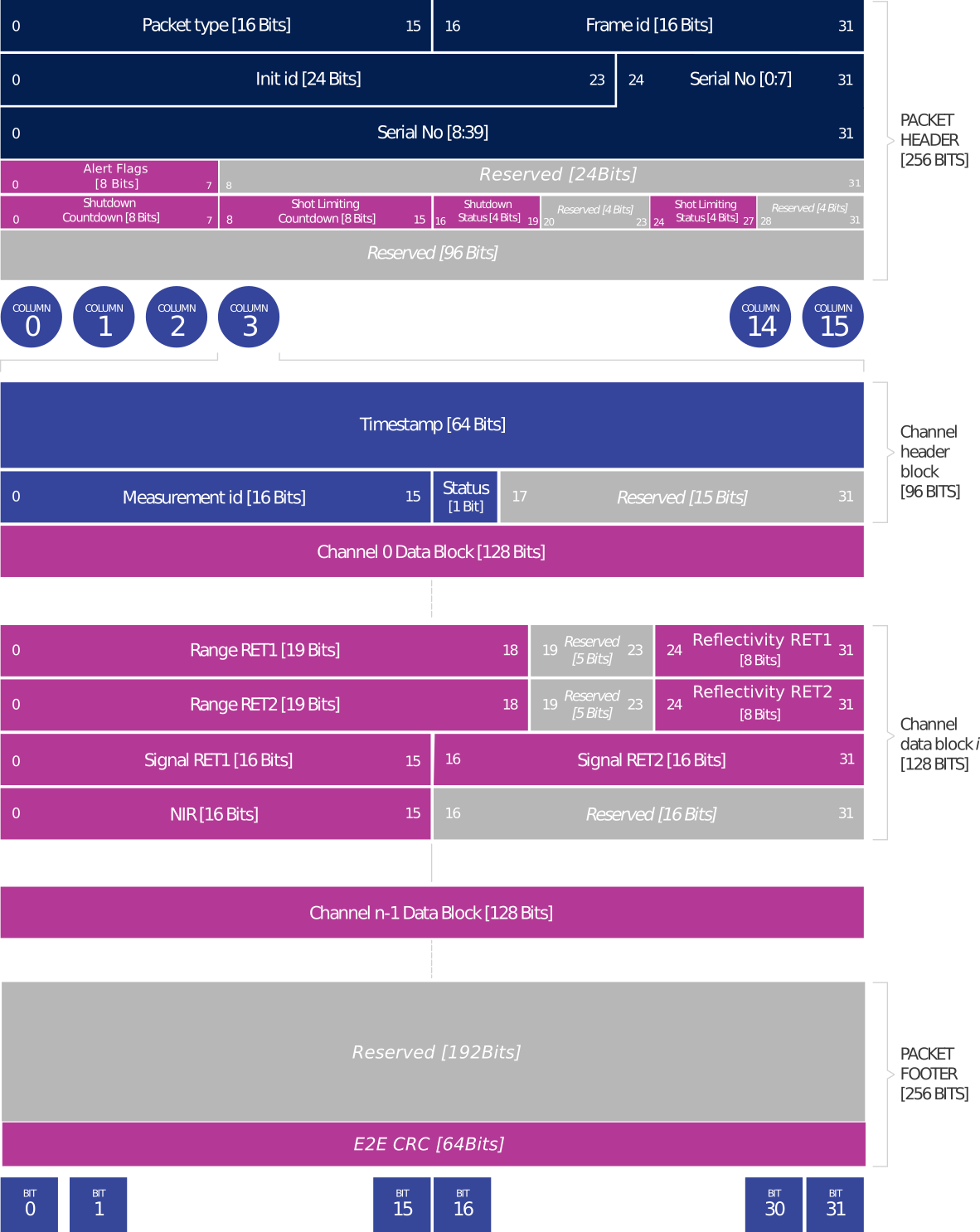
Dual Return Data Packet Configuration
Packet Size Calculation (Configurable)
Packet size can be calculated by the following formula:
packet_header_size + columns_per_packet * (measurement_header_size + pixels_per_column * channel_data_block_size) + packet_footer_size
For example:
32 + 16 * (12 + n * s) + 32 bytes
packet_header_size= 32 bytes
columns_per_packet= 16
measurement_header_size= 12 bytesn is
pixels_per_column(correspond to the number of channels: 128 for OS1-128)s is the size of a channel data block (16 bytes for RNG19_RFL8_SIG16_NIR16_DUAL configuration)
packet_footer_size= 32 bytes
The following tables below provide values for packet sizes, packet rates, and data rates for various products and configurations. These tables assume a default azimuth window of 360°. Providing a custom azimuth window can further lower packet rate and data rate. See the Azimuth Window section for details on setting a custom azimuth window.
Product |
Single Return |
Dual Return |
Low Data Rate |
OS-x-32 |
6400 |
8448 |
2304 |
OS-x-64 |
12544 |
16640 |
4352 |
OS-x-128 |
24832 |
33024 |
8448 |
Product |
512x10 |
1024x10, 512x20 |
2048x10, 1024x20 |
OS-x-32 |
320 |
640 |
1280 |
OS-x-64 |
320 |
640 |
1280 |
OS-x-128 |
320 |
640 |
1280 |
Product |
Single Return |
Dual Return |
Low Data Rate |
OS-x-32 |
65.57 |
86.55 |
23.63 |
OS-x-64 |
128.49 |
170.43 |
44.60 |
OS-x-128 |
254.32 |
338.20 |
86.55 |
LEGACY Data Packet Format
Warning
LEGACY Data Packet Format is soon to be deprecated. Please refer to Single Return Profile section which will be the default mode starting with firmware v2.5 and later.
This option is backward compatible and is supported on earlier hardware versions as well. The data profile can be modified by changing the configuration parameter udp_profile_lidar to LEGACY.
Lidar Data Format
Note
Gen 1 OS1-16 and OS1-32 customers should note that upgrading to firmware v2.0.0 or higher will change their lidar packet format which reduces their data rates which is not backwards compatible with pre-v2.0.0 clients.
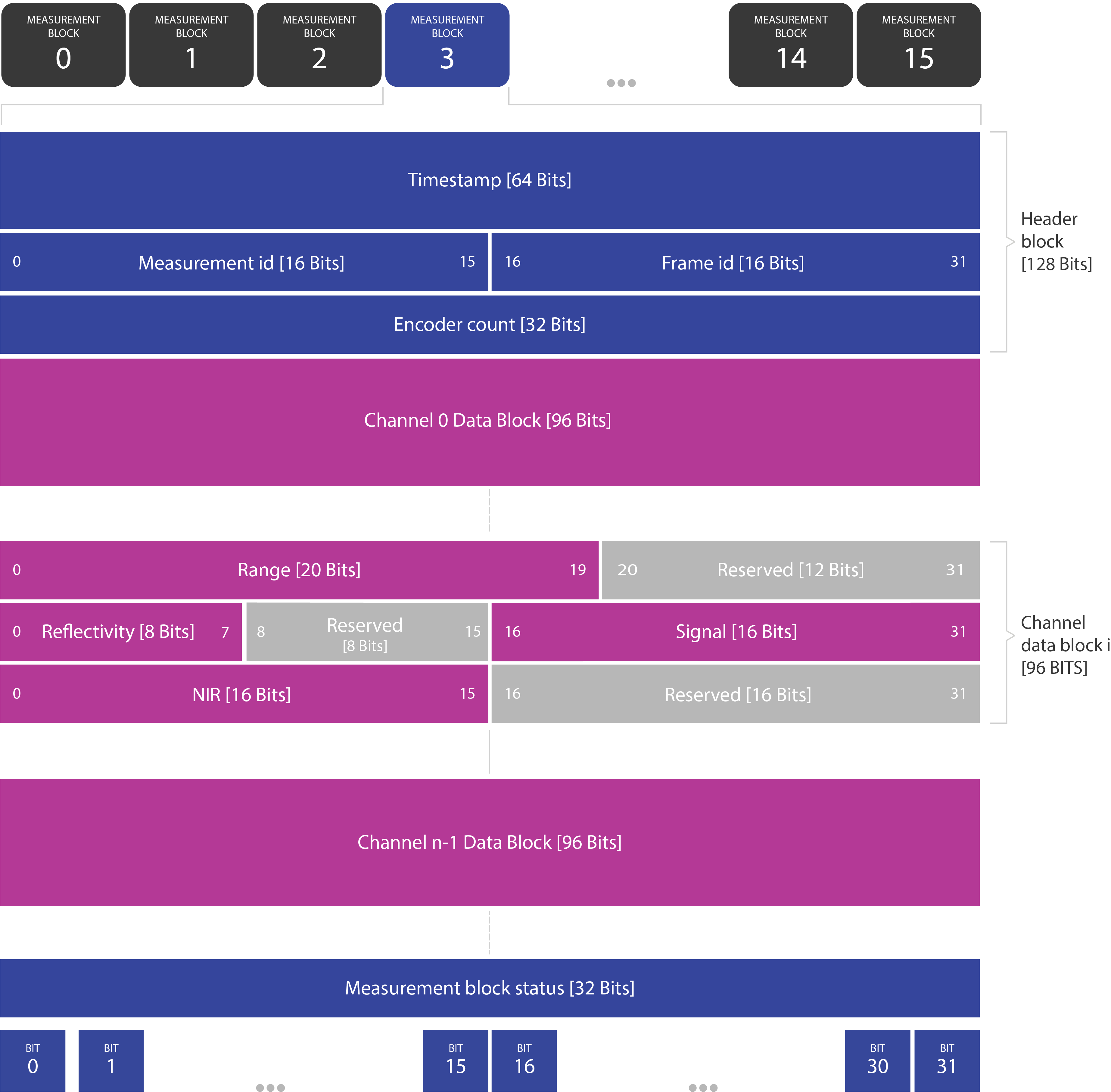
In this mode, lidar packets consist of 16 Measurement Blocks and vary in size relative to the number of channels in the sensor. The packet rate is dependent on the lidar mode. Words are 32 bits in length and little endian. By default, lidar UDP data is forwarded to Port 7502.
Please refer to the HTTP API Reference Guide portion of this manual for more information on setting this parameter. Alternately, this mode can also be configured via the Web Interface.
Lidar frames are composed of 512, 1024, or 2048 measurement blocks, depending upon lidar mode and are completely deterministic in number per frame and their monotonic order and position within lidar data packets. This determinism allows for efficient lookup table-based decoding in clients.
Each Measurement Block contains:
Header Block [128 bits]
Timestamp [64 bit unsigned int] - timestamp of the measurement in nanoseconds.
Measurement ID [16 bit unsigned int] - a sequentially incrementing measurement counting up from 0 to 511, or 0 to 1023, or 0 to 2047 depending on lidar_mode.
Frame ID [16 bit unsigned int] - index of the lidar scan. Increments every time the sensor completes a rotation, crossing the zero point of the encoder.
Encoder Count [32 bit unsigned int] - an azimuth angle as a raw encoder count, starting from 0 with a max value of 90,111 - incrementing 44 ticks every azimuth angle in 2048 mode, 88 ticks in 1024 mode, and 176 ticks in 512 mode. Note: the encoder count is redundant with the Measurement ID and will be deprecated in the future.
Channel Data Blocks [96 bits each]
Range [32 bit unsigned int - only 20 bits used] - range in millimeters, discretized to the nearest 1 millimeters.
Calibrated Reflectivity [8 bit unsigned int] - sensor Signal Photons measurements are scaled based on measured range and sensor sensitivity at that range, providing an indication of target reflectivity. Note that calibrated reflectivity has certain hardware requirements. Please refer to the Calibrated Reflectivity section for more details.
Signal Photons [16 bit unsigned int] - signal intensity photons in the signal return measurement are reported.
Near Infrared Photons [16 bit unsigned int] - NIR photons related to natural environmental illumination are reported.
Measurement Block Status [32 bits]- indicates whether the measurement block contains valid or zero-padded data in its channels’ Data Blocks. Valid = 0xFFFFFFFF, Padded = 0x0. If the Measurement Block Status is Padded (e.g. in the case of channel data being dropped or if the Measurement Block is outside of the azimuth window), values within the Channel Data Blocks will be 0, but values within the Header Block remain valid.
LEGACY Packet Data Configuration
Packet Size Calculation (LEGACY)
The table below shows the lidar data packet size breakdown for all products when LEGACY profile is configured. Since the size of the measurement block varies proportional to the number of channels in a sensor, all sensors with the same number of channels have the same lidar packet data structure and size.
Product |
Number of words in Measurement Block |
Size of single Measurement Block (Bytes) |
Size of lidar packet (Bytes) |
OS1-16 |
53 |
212 |
3,392 |
OS0-32, OS1-32, OS2-32 |
101 |
404 |
6,464 |
OS0-64, OS1-64, OS2-64 |
197 |
788 |
12,608 |
OS0-128, OS1-128, OS2-128 |
389 |
1,556 |
24,896 |
The table below calculates the data of all products operating at the highest lidar modes, 2048x10 or 1024x20 for LEGACY profile assuming a default azimuth window of 360°. Providing a custom azimuth window can further lower data rate. See the Azimuth Window section for details on setting a custom azimuth window.
Product |
LEGACY Lidar packet size (Bytes) |
LEGACY Lidar packets rate (Hz) |
LEGACY Data Rate (Mbps) |
OS1-16 |
3392 |
1280 |
34.77 |
OS0-32, OS1-32, OS2-32 |
6464 |
1280 |
66.23 |
OS0-64, OS1-64, OS2-64 |
12608 |
1280 |
129.14 |
OS0-128, OS1-128, OS2-128 |
24896 |
1280 |
254.97 |
Calibrated Reflectivity
Starting in firmware v2.1.0, sensors have an 8-bit reflectivity data field. Existing sensors in the field that update to v2.1.0 will have default calibration values pushed to them. Sensors that have been factory calibrated for reflectivity will have a higher accuracy of reflectivity.
Note
If using Rev7 sensors, please use Firmware v3.0.0 and later.
The command get_calibration_status will return the status of your sensor calibration. The calibration status is returned with the following format:
{
"reflectivity":
{
"valid": "true: if factory calibrated for better accuracy, false: if not calibrated -- using default
values and likely has less accuracy",
"timestamp": "Date when the calibration has been performed"
}
}
Please contact your support@ouster.io if you have questions on whether your sensor is hardware-enabled for calibrated reflectivity.
Reflectivity Data Mapping
Reflectivity values between 0-100 are linearly mapped for lambertian targets with values between 0% and 100% reflectivity. Values between 101-255 are mapped as log 2 with linear interpolation between logarithmic points for retroreflective targets. The 255 value corresponds to a retroreflector 864 times stronger than a 100% lambertian target. The charts below show the mapping functions.
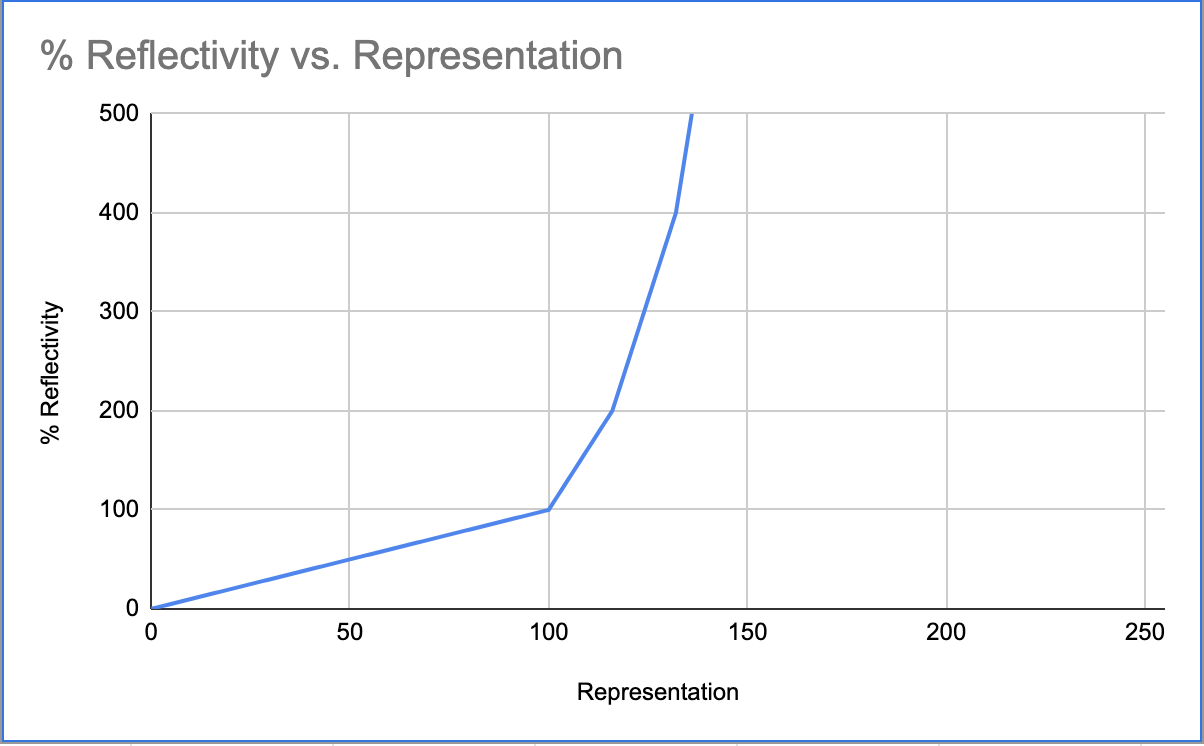
% Reflectivity vs Representation

% Reflectivity vs Representation (Log Scale)
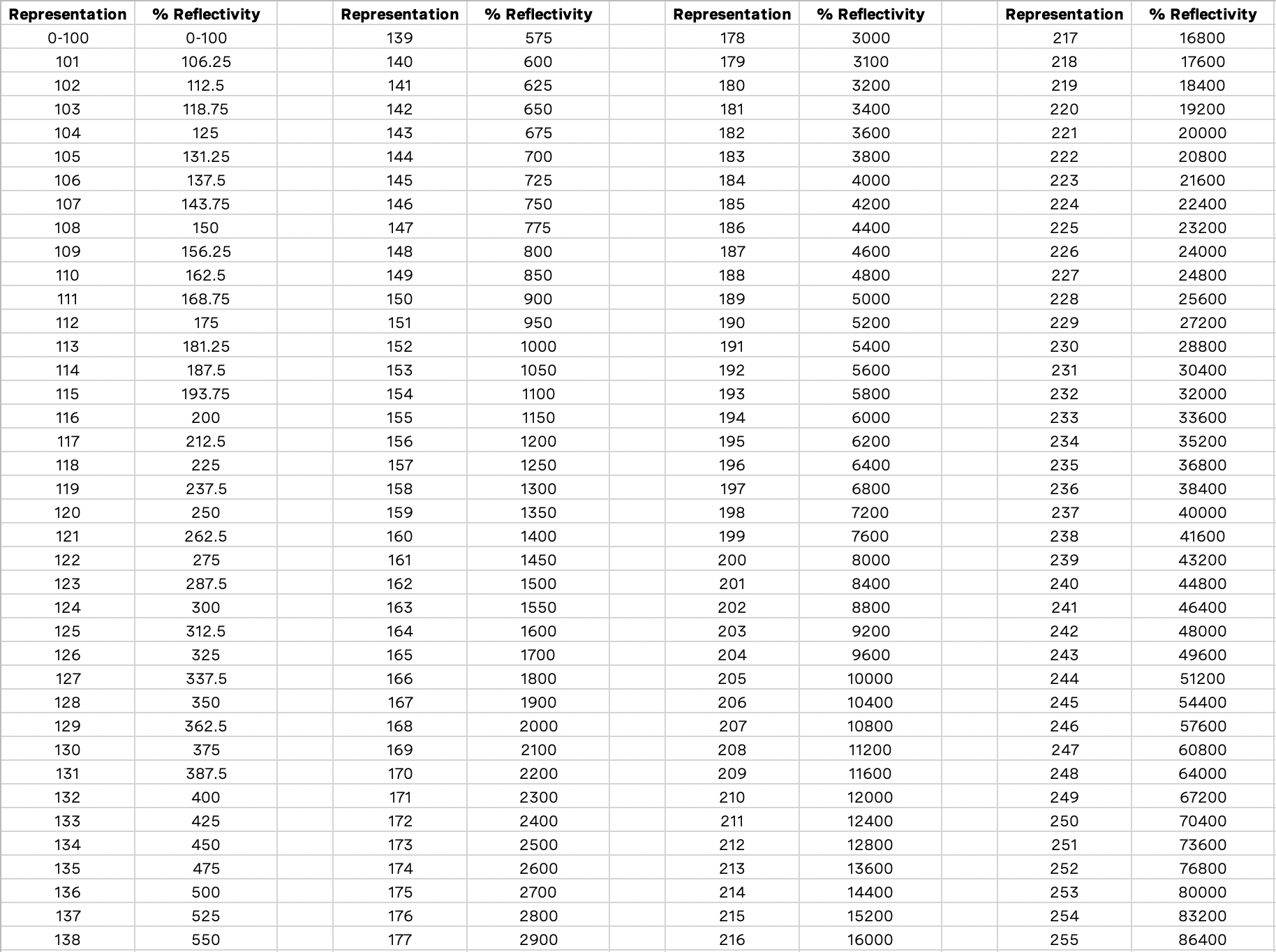
Representation and Reflectivity data set
IMU Data Format
IMU UDP Packets are 48 Bytes long and by default are sent to Port 7503 at 100 Hz. Data is organized in little endian format.
Note
IMU data format is the same regardless of the lidar data profile selected by the user.
Each IMU data block contains:
IMU Diagnostic Time [64 bit unsigned int] - timestamp of monotonic system time since boot in nanoseconds.
Accelerometer Read Time [64 bit unsigned int] - timestamp for accelerometer time relative to timestamp_mode in nanoseconds.
Gyroscope Read Time [64 bit unsigned int] - timestamp for gyroscope time relative to timestamp_mode in nanoseconds.
Acceleration in X-axis [32 bit float] - acceleration in g.
Acceleration in Y-axis [32 bit float] - acceleration in g.
Acceleration in Z-axis [32 bit float] - acceleration in g.
Angular Velocity about X-axis [32 bit float] - Angular velocity in deg per sec.
Angular Velocity about Y-axis [32 bit float] - Angular velocity in deg per sec.
Angular Velocity about Z-axis [32 bit float] - Angular velocity in deg per sec.
Note that the first timestamp (Words 0,1) is for diagnostics only and is rarely used under normal operation.
The second two timestamps, (Words 2,3) and (Words 4,5), are sampled on the same clock as the lidar data, so should be used for most applications.
Ouster provides timestamps for both the gyro and accelerometer in order to give access to the lowest level information. In most applications it is acceptable to use the average of the two timestamps.
Product |
IMU packet size (Bytes) |
IMU packets per second |
OS1-16 |
48 |
100 |
OS0-32, OS1-32, OS2-32 |
48 |
100 |
OS0-64, OS1-64, OS2-64 |
48 |
100 |
OS0-128, OS1-128, OS2-128 |
48 |
100 |

IMU Packet Format